Pearson's MyLab & MasteringMasteringEngineering Mastering x+ C https://session.masteringengineering.com/myct/itemView?offset- next&lassignmentProblemiD-8341780 Homework 4 Problem 13.112 Part A The pilot of an airplane executes a vertical loop which in part follows the path of a four-leaved rose,r (-600 cos 20 ft, where θ is in radians. His speed at A is a constant up-80 ft/s He weighs 135 lb. Hint To determine the time derivatives necessary to compute the acceleration components ar and ae take the first and second time derivatives of r -600 cos 20) Determine the magnitude of the vertical reaction the seat of the plane exerts on the pilot when the plane is at A Express your answer to three significant figures and include the appropriate units. Then,for turther infomalion use +(re) to determine θ. Also, take the time derivative of-yW + (ref noting that tp:0, to determined (Figure 1) NValue Units Submit Request Answer K Return to Assignment Provide Feedback Figure 1 of 1 r-600 cos 26
Pearson's MyLab & MasteringMasteringEngineering Mastering x+ C https://session.masteringengineering.com/myct/itemView?offset- next&lassignmentProblemiD-8341780 Homework 4 Problem 13.112 Part A The pilot of an airplane executes a vertical loop which in part follows the path of a four-leaved rose,r (-600 cos 20 ft, where θ is in radians. His speed at A is a constant up-80 ft/s He weighs 135 lb. Hint To determine the time derivatives necessary to compute the acceleration components ar and ae take the first and second time derivatives of r -600 cos 20) Determine the magnitude of the vertical reaction the seat of the plane exerts on the pilot when the plane is at A Express your answer to three significant figures and include the appropriate units. Then,for turther infomalion use +(re) to determine θ. Also, take the time derivative of-yW + (ref noting that tp:0, to determined (Figure 1) NValue Units Submit Request Answer K Return to Assignment Provide Feedback Figure 1 of 1 r-600 cos 26

Elements Of Electromagnetics
7th Edition
ISBN:9780190698614
Author:Sadiku, Matthew N. O.
Publisher:Sadiku, Matthew N. O.
ChapterMA: Math Assessment
Section: Chapter Questions
Problem 1.1MA

Related questions
Question
Transcribed Image Text:Pearson's MyLab & MasteringMasteringEngineering Mastering x+
C https://session.masteringengineering.com/myct/itemView?offset- next&lassignmentProblemiD-8341780
Homework 4
Problem 13.112
Part A
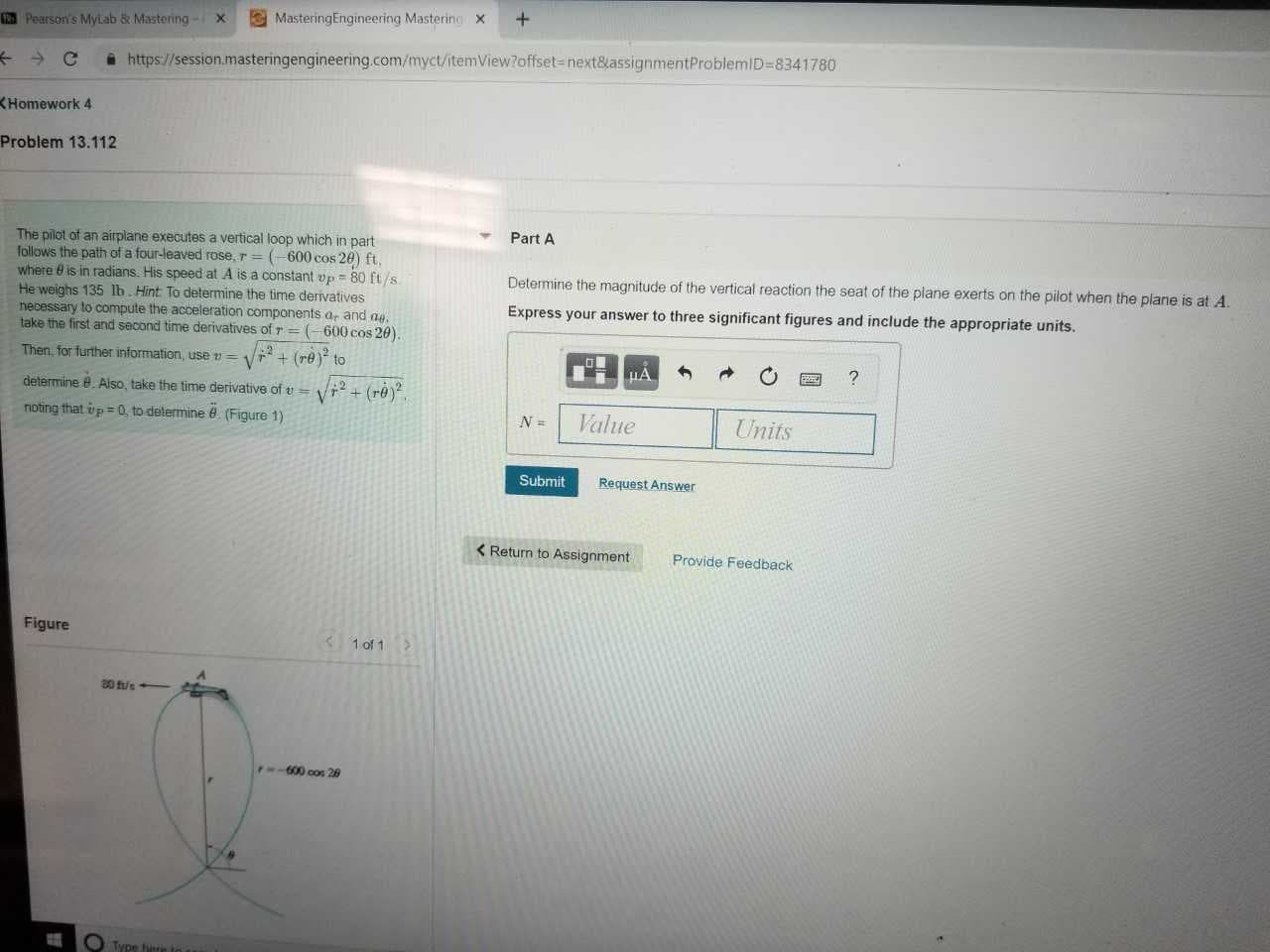
The pilot of an airplane executes a vertical loop which in part
follows the path of a four-leaved rose,r (-600 cos 20 ft,
where θ is in radians. His speed at A is a constant up-80 ft/s
He weighs 135 lb. Hint To determine the time derivatives
necessary to compute the acceleration components ar and ae
take the first and second time derivatives of r -600 cos 20)
Determine the magnitude of the vertical reaction the seat of the plane exerts on the pilot when the plane is at A
Express your answer to three significant figures and include the appropriate units.
Then,for turther infomalion use +(re) to
determine θ. Also, take the time derivative of-yW + (ref
noting that tp:0, to determined (Figure 1)
NValue
Units
Submit
Request Answer
K Return to Assignment
Provide Feedback
Figure
1 of 1
r-600 cos 26
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

This is a popular solution!

Trending now
This is a popular solution!

Step by step
Solved in 7 steps with 7 images

Recommended textbooks for you
Elements Of Electromagnetics
Mechanical Engineering
ISBN:
9780190698614
Author:
Sadiku, Matthew N. O.
Publisher:
Oxford University Press

Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:
9780134319650
Author:
Russell C. Hibbeler
Publisher:
PEARSON

Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:
9781259822674
Author:
Yunus A. Cengel Dr., Michael A. Boles
Publisher:
McGraw-Hill Education
Elements Of Electromagnetics
Mechanical Engineering
ISBN:
9780190698614
Author:
Sadiku, Matthew N. O.
Publisher:
Oxford University Press
Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:
9780134319650
Author:
Russell C. Hibbeler
Publisher:
PEARSON
Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:
9781259822674
Author:
Yunus A. Cengel Dr., Michael A. Boles
Publisher:
McGraw-Hill Education

Control Systems Engineering
Mechanical Engineering
ISBN:
9781118170519
Author:
Norman S. Nise
Publisher:
WILEY

Mechanics of Materials (MindTap Course List)
Mechanical Engineering
ISBN:
9781337093347
Author:
Barry J. Goodno, James M. Gere
Publisher:
Cengage Learning

Engineering Mechanics: Statics
Mechanical Engineering
ISBN:
9781118807330
Author:
James L. Meriam, L. G. Kraige, J. N. Bolton
Publisher:
WILEY