Classical Dynamics of Particles and Systems
5th Edition
ISBN: 9780534408961
Author: Stephen T. Thornton, Jerry B. Marion
Publisher: Cengage Learning
expand_more
expand_more
format_list_bulleted
Question
Chapter 1, Problem 1.1P
To determine
The transformation matrix for rotation about
Expert Solution & Answer
Answer to Problem 1.1P
The transformation matrix for rotation about
Explanation of Solution
Consider the rotation given in the below figure.
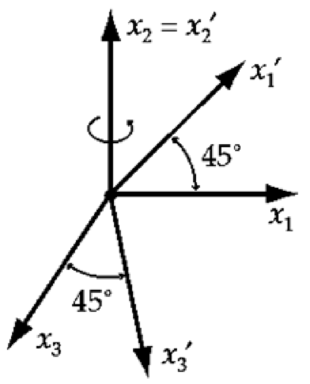
Rotation matrix for rotation about
Here,
Conclusion:
Substitute
Therefore, transformation matrix for rotation about
Want to see more full solutions like this?
Subscribe now to access step-by-step solutions to millions of textbook problems written by subject matter experts!
Students have asked these similar questions
Prove that matrix multiplication is associative. Show that the product of two orthogonal
matrices is also orthogonal.
Let vectors A=(2,1,−4), B=(−3,0,1), and C=(−1,−1,2).Calculate the following:
What is the angle θAB between A and B?
Consider the three displacement vectors = (−2î− 3ĵ) m, = (4î − 5ĵ) m, and = (−6î + 5ĵ) m.
Use the component method to determine the following. (Take the +x direction to be to the right.)
Chapter 1 Solutions
Classical Dynamics of Particles and Systems
Ch. 1 - Prob. 1.1PCh. 1 - 1.2. Prove Equations 1.10 and 1.11 from...Ch. 1 - Prob. 1.3PCh. 1 - Show
(a) (AB)t = BtAt (b) (AB)−1 = B−1 A−1
Ch. 1 - Prob. 1.5PCh. 1 - Prob. 1.6PCh. 1 - Consider a unit cube with one corner at the origin...Ch. 1 - Prob. 1.8PCh. 1 - For the two vectors
find
A − B and |A –...Ch. 1 - A particle moves in a plane elliptical orbit...
Ch. 1 - Prob. 1.11PCh. 1 - Let a, b, c be three constant vectors drawn from...Ch. 1 - X is an unknown vector satisfying the following...Ch. 1 - Prob. 1.14PCh. 1 - Prob. 1.15PCh. 1 - What surface is represented by r a = const, that...Ch. 1 - Obtain the cosine law of plane trigonometry by...Ch. 1 - Obtain the sine law of plane trigonometry by...Ch. 1 - Prob. 1.19PCh. 1 - 1-20. Show that
Ch. 1 - Show (see also Problem 1–11) that
Ch. 1 - Prob. 1.22PCh. 1 - Use the εijk notation and derive the identity
(A ×...Ch. 1 - Prob. 1.24PCh. 1 - Find the components of the acceleration vector a...Ch. 1 - Prob. 1.26PCh. 1 - If r and are both explicit functions of time,...Ch. 1 - Show that
Ch. 1 - Prob. 1.29PCh. 1 - Prob. 1.30PCh. 1 - Show that
(a)
(b)
(c)
Ch. 1 - Show that (2arr+2brr)dt=ar2+br2+const. where r is...Ch. 1 - Show that (rrrrr2)dt=rr+C where C is a constant...Ch. 1 - Prob. 1.34PCh. 1 - Prob. 1.35PCh. 1 - Prob. 1.36PCh. 1 - Prob. 1.37PCh. 1 - Prob. 1.38PCh. 1 - A plane passes through the three points (x, y, z)...Ch. 1 - For what values of a are the vectors A = 2ai − 2j...
Knowledge Booster

Similar questions
- If f is a scalar function and v = [v1, v2, v3] is a vector field. Show that div(fv)=f divv+v·∇farrow_forwardFor a one dimensional system, x is the position operator and p the momentum operator in the x direction.Show that the commutator [x, p] = iharrow_forwardFor any arbitrary vectors u, v and w, prove thatarrow_forward
- Show that a set of vectors V (not containing the 0 vector)is linearly dependent if and only if there exists some vectorin V that can be written as a nontrivial linear combinationof other vectors in V.arrow_forwardFor any vectors A and B, prove that ∇·(A×B) = B·(∇×A) − A·(∇×B)arrow_forwardThe figure shows two railway cars with a buffer spring. We want to investigate the transfer of momentum that occurs after car 1 with initial velocity v0 impacts car 2 at rest. The differential equation is given below. Show that the eigenvalues of the coefficient matrix A are λ1=0 and λ2=−c1−c2, with associated eigenvectors v1= 1 1 T and v2= c1 −c2 T. x′′= −c1 c1 c2 −c2 x with ci=k /mi for i=1, 2 The coefficient matrix A is .arrow_forward
- Let vector A point from the origin into the second quadrant of the xy plane and vector B point from the origin into the fourth quadrant. The vector B −A must be in which quadrant?arrow_forwardTwo points in the Cartesian plane are A(2.00m,4.00m) and B(-3.00m,3.00m) . Find the distance between them and their polar coordinates.arrow_forwardRectangular coordinates of a point are given by (2,y) and its polar coordinates are given by (r,/6) . Find y y and r .arrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
 Classical Dynamics of Particles and SystemsPhysicsISBN:9780534408961Author:Stephen T. Thornton, Jerry B. MarionPublisher:Cengage Learning
Classical Dynamics of Particles and SystemsPhysicsISBN:9780534408961Author:Stephen T. Thornton, Jerry B. MarionPublisher:Cengage Learning University Physics Volume 1PhysicsISBN:9781938168277Author:William Moebs, Samuel J. Ling, Jeff SannyPublisher:OpenStax - Rice University
University Physics Volume 1PhysicsISBN:9781938168277Author:William Moebs, Samuel J. Ling, Jeff SannyPublisher:OpenStax - Rice University
Classical Dynamics of Particles and Systems
Physics
ISBN:9780534408961
Author:Stephen T. Thornton, Jerry B. Marion
Publisher:Cengage Learning
University Physics Volume 1
Physics
ISBN:9781938168277
Author:William Moebs, Samuel J. Ling, Jeff Sanny
Publisher:OpenStax - Rice University