
Concept explainers
Videos
Moored floating platforms are subject to external disturbances such as waves, wind, and currents that cause them to drift. There are certain applications, such as diving support, drilling pipe-laying, and tank¬ing between ships in which precise positioning of moored platforms is very important (Munoz-Mansilla, 2011). Figure Pl.4 illustrates a tethered platform in which side thrusters are used for positioning. A control
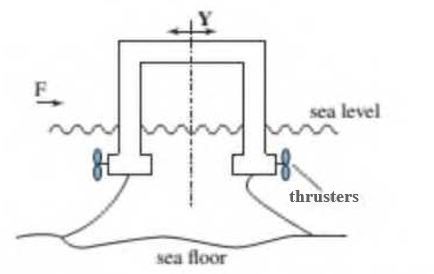
FIGURE Pl.4 Tethered platform using side thrusters for positioning�
Munoz-Mansilla,. R., Aranda, J., Diaz, J. M Chaos, D., and Reinoso, A. J.,
Applications of QFT Robust Control Techniques to Manne Systems. 9th IEEE International Conference on Control and Automation. December 19-21. 2011. pp. 378-385. (Figure 3. p. 382). system is to be designed in which the objective is to minimize the drift. Y, and an angular deviation from the vertical axes. ϕ (not shown). The disturbances acting on the system's outputs are the force. F. and the torque, M, caused by the external environment. In this problem, the plant will have one input, the force delivered by the thrusters (Fu) and two outputs. Y and ϕ. Note also that this is a disturbance attenuation problem, so there is no command input. Draw a block diagram of the system indicating the disturbances F and M. the control signal Fu, and the outputs Y and ϕ. Your diagram should also have blocks for a controller, the one-input two-output plant, and a block indicating how the disturbances affect each of the outputs.
Want to see the full answer?
Check out a sample textbook solution
Chapter 1 Solutions
Control Systems Engineering


- Explain three position synthesis of four bar chain mechanism by relative pole method.arrow_forward(machine dynamics)It is desired to balance the rotor shown in the figure by placing balancing masses at a distance of ei and Li mm from the rotation axis in the R and L balancing planes. Find the balancing masses and their angular positions to be used in balancing. Use the values given in the table.Find the L and R support reactions.arrow_forwardThe rams of a four-ram hydraulic steering gear are 225 mm in diameter, the rudder stock is 450 mm indiameter, and the distance from the center of the rudder stock to centerline of rams is 800 mm. Calculate thestress (in MPa) in the rudder stock at the instant the rudder is moving past in mid-position and the hydraulicpressure is 80 bar.arrow_forward
- draw kinematic diagram of following mechanisms 4, 5 and 6 and calculate their degree of freedomarrow_forwardDetermine PB-PA of the following system given the following tablearrow_forwardA crank-rocker mechanism is to be used to drive a ratchet mechanism. Using mathematics and specific illustrations, find the required coupler length in inches required to generate this motion. The swing of the rocker is 35.0 from the vertical position in each direction. (Note: O2 is the crank pivot; O4 is the rocker pivot; C is the coupler-rocker joint; B is the coupler-crank joint). O2O4: 4.1 in.; lies in the horizontal plane O4C: 4.8 in.; mid stroke is verticalarrow_forward
- The position vectors that are defined for kinematic analysis of a mechanism should form one or more kinematic loops also called?arrow_forwardA schematic diagram of the knee joint is shown in Fig, where Cdenotes the effective center of rotation of the knee and P is the point of insertion of the quadriceps tendon to the patella. The distance from C to P is 10 cm. The quadriceps, responsible for extension of the knee, are known to produce maximum isometric tetanic tension at an effective optimal length of 30 cm. This occurs when the knee flexion angle, θ, is 45◦. Obtaining muscle performance data from the appropriate figure in this chapter, determine the range of knee flexion angles for which the quadriceps produce an isometric tetanic tension at least 80% of maximal. Hint: be careful to use radians (rather than degrees) in this question when appropriate.arrow_forwardFind the degree of freedom of mechanism given below,arrow_forward
 Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY