
Concept explainers
Videos
Find three (or other number as assigned) of the following common devices. Sketch careful kinematic diagrams and find their total degrees of freedom.
- An automobile hood hinge
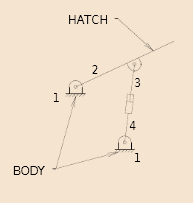
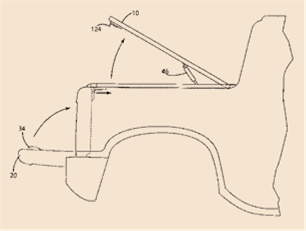
mechanism - An automobile hatchback lift mechanism
- An electric can opener
- A folding ironing board
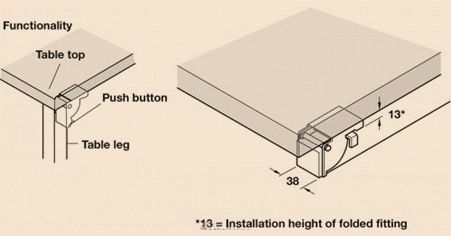
- A folding card able
- A folding beach chair
- A baby swing
- A folding baby walker
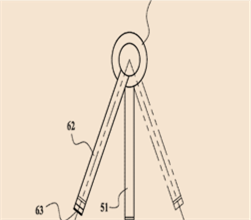
- A fancy corkscrew as shown in Figure P2-9
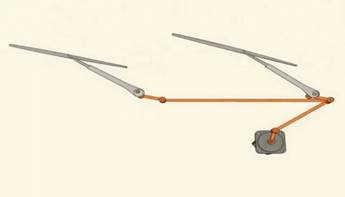
- A windshield wiper mechanism
- A dump truck dump mechanism
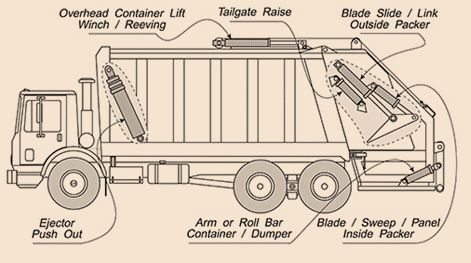
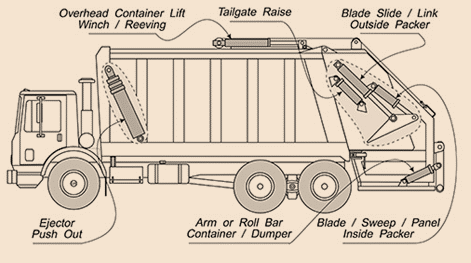
- A trash truck dumpster mechanism
- A pickup truck tailgate mechanism
- An automobile jack
- A collapsible auto radio antenna
a.
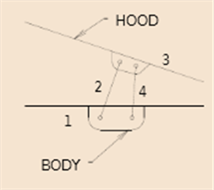
To find:Kinematic diagrams and total DOF in an automobile hood hinge mechanism.
Explanation of Solution
Given information:
The initial conditions that are given are that of an automobile hood hinge mechanism
Calculation:
Here KutzbatchEquation is used to compute mobility (DOF) of the shown system below. An automobile mechanism systemcondition is as shown.
b.
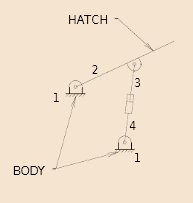
To find:Kinematic diagrams and total DOF inan automobile hatchback lift mechanism.
Explanation of Solution
Given information:
The initial conditions that are given are that of An automobile hatchback lift mechanism.
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the models below. Here mainly considering the given mechanism of an automobile hatchback lift mechanism which having the
c.
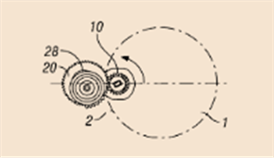
To find:Kinematic diagrams and total DOF in the electric can opener.
Explanation of Solution
Given information:
The initial conditions that are given are that of electric opener has 2 DOF.
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the given mechanismbelow. Here mainly considering the given mechanism of an electric opener has 2 DOF
d.
To find:Kinematic diagrams and total DOF in a folding ironing board.
Explanation of Solution
Given information:
The initial conditions that are given are that of a folding ironing board
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the given mechanism below.Here mainly considering the given mechanism A folding ironing board with One leg joins pivot joint on board and the other is slider joint.
e.
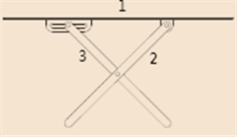
To find:Kinematic diagrams and total DOF in a folding card table.
Explanation of Solution
Given information:
The initial conditions that are given are that ofa folding card table.
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the given mechanism below. A folding card table having 7 DOF for considering 1 for individual leg, 2 for x-ylocation and one for angular orientation.
f.
To find:Kinematic diagrams and total DOF in a folding beach chair.
Explanation of Solution
Given information:
The initial conditions that are given are that of a folding beach chair.
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the given mechanism below. A folding beach chair with ternary links having analysis below is Subtract 1 DOF forced stop.

g.
To find:Kinematic diagrams and total DOF in a baby swing.
Explanation of Solution
Given information:
The initial conditions that are given are that ofa baby swing.
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the given mechanism below. A baby swing has 4 DOF,for swing 1 angular orientation w.r.t. frame, and 3 for location and orientation of the frame w.r.t. a 2-D frame.
h.
To find:Kinematic diagrams and total DOF in a folding baby walker.
Explanation of Solution
Given information:
The initial conditions that are given are that ofA folding baby walker
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the given mechanism below. A folding baby walker having 4 DOF with considering of 1 degree with unfolded, and 3 for the walkerlocation and orientation w.r.t.a 2-D frame.
i.
To find:Kinematic diagrams and total DOF in a fancy corkscrew.
Explanation of Solution
Given information:
The initial conditions that are given are that ofa fancy corkscrew.
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the given mechanism below. A fancy corkscrew having 2 DOF for screw rotated and arms rotate to translate w.r.t. screw.
j.
To find:Kinematic diagrams and total DOF in a windshield wiper mechanism.
Explanation of Solution
Given information:
The initial conditions that are given are that of A windshield wiper mechanism.
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the given mechanism below.A windshield wiper mechanism has 1 DOF with considering of the wiper blades position w.r.t. a single input.
k.
To find:Kinematic diagrams and total DOF in a dump truck mechanism.
Explanation of Solution
Given information:
The initial conditions that are given are that of. A dump-truck dump mechanism
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the given mechanism below.A dump-truck dump mechanism having 1 DOF for a angle of dump body for length of the hydraulic cylinder links w.r.t. the body truck.
l.
To find:Kinematic diagrams and total DOF in a trash truck mechanism.
Explanation of Solution
Given information:
The initial conditions that are given are that ofA trash truck dumpster mechanism
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the given mechanism below. A trash truck dumpster mechanism having 2 DOF for generally a rotation and a translation.
m.
To find:Kinematic diagrams and to find their total DOF in a trash truck tailgate mechanism.
Explanation of Solution
Given information:
The initial conditions that are given are that ofa pickup tailgate mechanism.
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the given mechanism below. A pickup tailgate mechanism having a 1 DOF.
n.
To find:Kinematic diagrams and total DOF in an automobile jack.
Explanation of Solution
Given information:
The initial conditions that are given are that ofAn automobile jack mechanism.
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the given mechanism below. An automobile jack having 1 DOF for height jack and the other for the positionand orientation of the jack w.r.t. a 2-D frame.
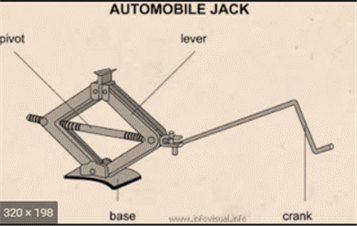
, total4 DOF
o.
To find:Kinematic diagrams and total DOF in a collapsible auto radio antenna.
Explanation of Solution
Given information:
The initial conditions that are given are that ofa collapsible auto radio antenna mechanism.
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the given mechanism below. Amany DOF with considering section for a collapsible auto radio antenna, its less one.
Want to see more full solutions like this?
Chapter 2 Solutions
DESIGN OF MACHINERY


- Draw the kinematic diagram of the following mechanismarrow_forwardO2BCO4 is a four-bar linkage. O2 and O4 are fixed centers on a horizontal line 10 in apart. O2B is a link 5 in long oscillating about O2. O4C is a crank 2 1⁄2 in long which rotates about O4. BC is a connecting rod 11 1⁄2 in long. O2 is to left of O4. A link, EF, 6 in long, is pinned to O2B at E, 1 1⁄2 in from B. Another link, GF, 3 1⁄2 in long, is pinned to link BC, 4 in from C. These links, EF and GF, are pinned together at F in their upper position.Trace the paths of the points F and G while driver O4C makes 1 complete revolution. Find points for each 15o position of O4C and any others necessary in order to secure a smooth curve.arrow_forwardSelect one simple mechanism (4 links) and explain the following with regards to the selected mechanism. i. Kinematic pairs based on nature of contact. ii. Kinematic pairs based on nature of relative motion. iii. Degrees of freedom. iv. Possible inversions and applicationsarrow_forward
- 1. Sketch kinematic diagram 2. Identify number of links, 1 dof joints, 2 dof joints, and 3 dof joints. 3.Calculate the number of degrees of freedom for each mechanism. Please calculate the degrees of freedom only for the mechanism of the toilet tank shown in the picturearrow_forwardQ2BCQ4 is a four-bar linkage. Q2 and Q4 are fixed centers on ahorizontal line 10-inches apart. Q2B is a link 5-inches long oscillating aboutQ2. Q4C is a crank 21⁄2-inches long which rotates about Q4. BC is a connectingrod 111⁄2-inches long. Q2 is to the left of Q4. A link EF, 6-inches long ispinned to Q2B at E, 11⁄2-inch.from B. Another link, GF, 31⁄2-inches long ispinned to link BC, 4-inches from C. These links, EF and GF, are pinnedtogether at F in their upper position.Trace the paths of the points F and G while Q4C makes 1 completerevolution. Find the points for each 15o position of Q4C and any othersnecessary in order to secure a smooth curve.Scale: Space, 1⁄2 in. = 1 in.arrow_forwardFind the degrees of freedom of the mechanism in the figure.arrow_forward
- 1. Determine binary, ternary link and quaternary link for the given kinematic chain as shown in figure below and also find the number of degrees of freedom by using Kutzbach criteria. 2.Explain with neat line diagram how Scotch yoke mechanism is used in control valve actuators in high-pressure oil and gas pipelines, as well as in various internal combustion engines, such as the Bourke engine.arrow_forwardThe number of degrees of freedom of the linkage shown in the figure.arrow_forwardDetermine binary, ternary link and quaternary link for the given kinematic chain as shown in figure below and also find the number of degrees of freedom by using Kutzbach criteria.arrow_forward
- In the below figure a Double-parallelogram mechanism is shown. Here PQ is a single link. Calculate the mobility of the mechanism?arrow_forward1.Draw the kinematic diagram of the following mechanism? 2.Draw the kinematic diagram of the following mechanism?arrow_forwardFind the degree of freedom of the mechanism shown below,arrow_forward
 Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY