1. Solve the following systems of equations by matrix method (solving the eigenvalue problem). In each case, find the equilibrium point(s). Finally, sketch the phase portrait by hand in a way that clearly shows the relationship between the (directed) trajectories and the direction of eigenvectors, and any possible rotational effects, and determine the behavior (source, sink, or saddle) and type (asymptotically stable, or unstable) of the equilibrium point(s). i = 4x + 5y (a) 1) * - ( )* Si = -2r1 - 12 (c) |i2 = x1 – 4x2 3 2 (b) х = -x + 2y 8. -3 0 (& ) 1 3 (d) x = (e) x = 3 9 -3
1. Solve the following systems of equations by matrix method (solving the eigenvalue problem). In each case, find the equilibrium point(s). Finally, sketch the phase portrait by hand in a way that clearly shows the relationship between the (directed) trajectories and the direction of eigenvectors, and any possible rotational effects, and determine the behavior (source, sink, or saddle) and type (asymptotically stable, or unstable) of the equilibrium point(s). i = 4x + 5y (a) 1) * - ( )* Si = -2r1 - 12 (c) |i2 = x1 – 4x2 3 2 (b) х = -x + 2y 8. -3 0 (& ) 1 3 (d) x = (e) x = 3 9 -3

Linear Algebra: A Modern Introduction
4th Edition
ISBN:9781285463247
Author:David Poole
Publisher:David Poole
Chapter4: Eigenvalues And Eigenvectors
Section4.4: Similarity And Diagonalization
Problem 6EQ

Related questions
Question
need Help with problems A and B! Only complete solutions to A and B please. Thank you.
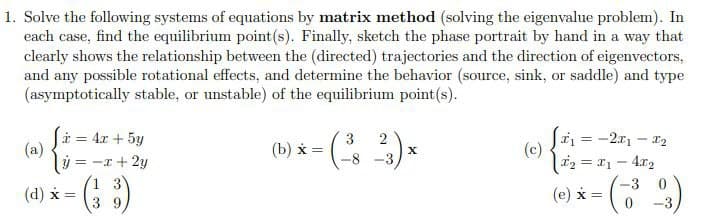
Transcribed Image Text:1. Solve the following systems of equations by matrix method (solving the eigenvalue problem). In
each case, find the equilibrium point(s). Finally, sketch the phase portrait by hand in a way that
clearly shows the relationship between the (directed) trajectories and the direction of eigenvectors,
and any possible rotational effects, and determine the behavior (source, sink, or saddle) and type
(asymptotically stable, or unstable) of the equilibrium point(s).
i = 4x + 5y
(a)
Sa = -2x1 – 12
(c)
|i2 = 11 – 4x2
3
2
(b) х
= -x + 2y
8.
-3
(& )
1 3
-3 0
(d) x =
(e) x =
3 9
-3
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

This is a popular solution!

Trending now
This is a popular solution!

Step by step
Solved in 3 steps with 2 images

Recommended textbooks for you
Linear Algebra: A Modern Introduction
Algebra
ISBN:
9781285463247
Author:
David Poole
Publisher:
Cengage Learning
Linear Algebra: A Modern Introduction
Algebra
ISBN:
9781285463247
Author:
David Poole
Publisher:
Cengage Learning