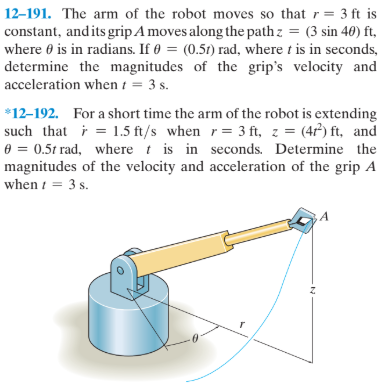
12–191. The arm of the robot moves so that r= 3 ft is constant, and its grip A moves along the path z = (3 sin 40) ft, where 0 is in radians. If 0 = (0.51) rad, where t is in seconds, determine the magnitudes of the grip's velocity and acceleration when t = 3 s. *12-192. For a short time the arm of the robot is extending such that i = 1.5 ft/s when r= 3 ft, z = (47) ft, and 0 = 0.5t rad, where t is in seconds. Determine the magnitudes of the velocity and acceleration of the grip A when i = 3 s.
12–191. The arm of the robot moves so that r= 3 ft is constant, and its grip A moves along the path z = (3 sin 40) ft, where 0 is in radians. If 0 = (0.51) rad, where t is in seconds, determine the magnitudes of the grip's velocity and acceleration when t = 3 s. *12-192. For a short time the arm of the robot is extending such that i = 1.5 ft/s when r= 3 ft, z = (47) ft, and 0 = 0.5t rad, where t is in seconds. Determine the magnitudes of the velocity and acceleration of the grip A when i = 3 s.

Related questions
Question
Transcribed Image Text:12–191. The arm of the robot moves so that r= 3 ft is
constant, and its grip A moves along the path z = (3 sin 40) ft,
where 0 is in radians. If 0 = (0.51) rad, where t is in seconds,
determine the magnitudes of the grip's velocity and
acceleration when t = 3 s.
*12-192. For a short time the arm of the robot is extending
such that i = 1.5 ft/s when r= 3 ft, z = (47) ft, and
0 = 0.5t rad, where t is in seconds. Determine the
magnitudes of the velocity and acceleration of the grip A
when i = 3 s.
Expert Solution


Trending now
This is a popular solution!

Step by step
Solved in 9 steps with 1 images
