Consider a block stacking robot with the following actions: 1 Stack(x, y) • Preconditions: Clear(y), Holding(x) • Effects: armEmpty, On(x, y), ¬Clear(y), ¬Holding(x) 1 Unstack(x, y) • Preconditions: Clear(x), On(x, y), armEmpty Effects: narmEmpty, ¬On(x, y), Clear(y), Holding(x) 1 Pickup(x) • Preconditions: Clear(x), On(x, TABLE), armEmpty • Effects: narmEmpty, ¬On(x, TABLE), Holding(x) • Putdown(x) • Preconditions: Holding(x) • Effects: armEmpty, On(x, TABLE), ¬Holding(x) Create a plan for each of the initial state/goal pairs below Assume armEmpty is in initial state and the table has infinite space A Initial state: B A Goal state: В a. A В Initial state: В Goal state: A b. A C B Initial state: A В Goal state: C C.
Consider a block stacking robot with the following actions: 1 Stack(x, y) • Preconditions: Clear(y), Holding(x) • Effects: armEmpty, On(x, y), ¬Clear(y), ¬Holding(x) 1 Unstack(x, y) • Preconditions: Clear(x), On(x, y), armEmpty Effects: narmEmpty, ¬On(x, y), Clear(y), Holding(x) 1 Pickup(x) • Preconditions: Clear(x), On(x, TABLE), armEmpty • Effects: narmEmpty, ¬On(x, TABLE), Holding(x) • Putdown(x) • Preconditions: Holding(x) • Effects: armEmpty, On(x, TABLE), ¬Holding(x) Create a plan for each of the initial state/goal pairs below Assume armEmpty is in initial state and the table has infinite space A Initial state: B A Goal state: В a. A В Initial state: В Goal state: A b. A C B Initial state: A В Goal state: C C.

Computer Networking: A Top-Down Approach (7th Edition)
7th Edition
ISBN:9780133594140
Author:James Kurose, Keith Ross
Publisher:James Kurose, Keith Ross
Chapter1: Computer Networks And The Internet
Section: Chapter Questions
Problem R1RQ: What is the difference between a host and an end system? List several different types of end...

Related questions
Question
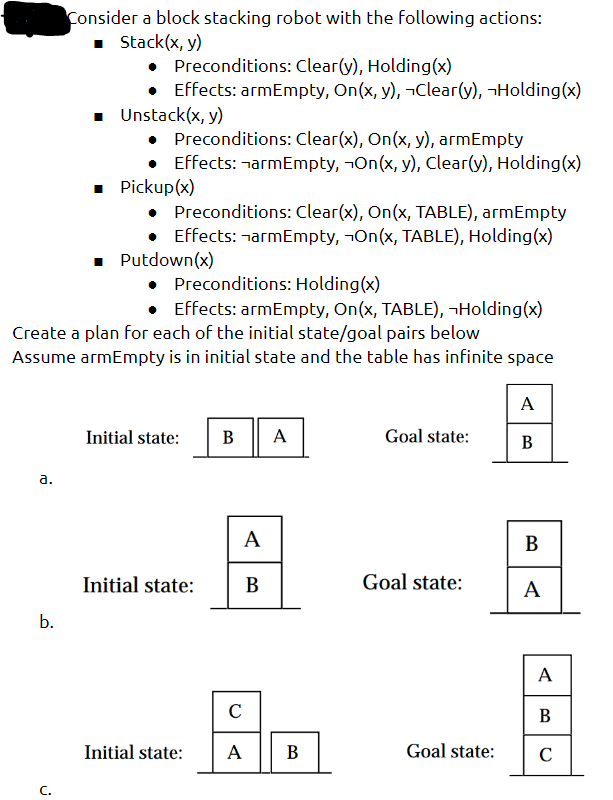
Transcribed Image Text:Consider a block stacking robot with the following actions:
1 Stack(x, y)
Preconditions: Clear(y), Holding(x)
• Effects: armEmpty, On(x, y), ¬Clear(y), ¬Holding(x)
. Unstack(x, y)
• Preconditions: Clear(x), On(x, y), armEmpty
• Effects: ¬armEmpty, ¬On(x, y), Clear(y), Holding(x)
1 Pickup(x)
Preconditions: Clear(x), On(x, TABLE), armEmpty
• Effects: ¬armEmpty, ¬On(x, TABLE), Holding(x)
• Putdown(x)
• Preconditions: Holding(x)
• Effects: armEmpty, On(x, TABLE), ¬Holding(x)
Create a plan for each of the initial state/goal pairs below
Assume armEmpty is in initial state and the table has infinite space
А
Initial state:
B
A
Goal state:
B
a.
A
В
Initial state:
В
Goal state:
A
b.
A
C
В
Initial state:
A
В
Goal state:
C
C.
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

This is a popular solution!

Trending now
This is a popular solution!

Step by step
Solved in 2 steps with 2 images

Recommended textbooks for you
Computer Networking: A Top-Down Approach (7th Edi…
Computer Engineering
ISBN:
9780133594140
Author:
James Kurose, Keith Ross
Publisher:
PEARSON

Computer Organization and Design MIPS Edition, Fi…
Computer Engineering
ISBN:
9780124077263
Author:
David A. Patterson, John L. Hennessy
Publisher:
Elsevier Science

Network+ Guide to Networks (MindTap Course List)
Computer Engineering
ISBN:
9781337569330
Author:
Jill West, Tamara Dean, Jean Andrews
Publisher:
Cengage Learning
Computer Networking: A Top-Down Approach (7th Edi…
Computer Engineering
ISBN:
9780133594140
Author:
James Kurose, Keith Ross
Publisher:
PEARSON
Computer Organization and Design MIPS Edition, Fi…
Computer Engineering
ISBN:
9780124077263
Author:
David A. Patterson, John L. Hennessy
Publisher:
Elsevier Science
Network+ Guide to Networks (MindTap Course List)
Computer Engineering
ISBN:
9781337569330
Author:
Jill West, Tamara Dean, Jean Andrews
Publisher:
Cengage Learning

Concepts of Database Management
Computer Engineering
ISBN:
9781337093422
Author:
Joy L. Starks, Philip J. Pratt, Mary Z. Last
Publisher:
Cengage Learning

Prelude to Programming
Computer Engineering
ISBN:
9780133750423
Author:
VENIT, Stewart
Publisher:
Pearson Education

Sc Business Data Communications and Networking, T…
Computer Engineering
ISBN:
9781119368830
Author:
FITZGERALD
Publisher:
WILEY