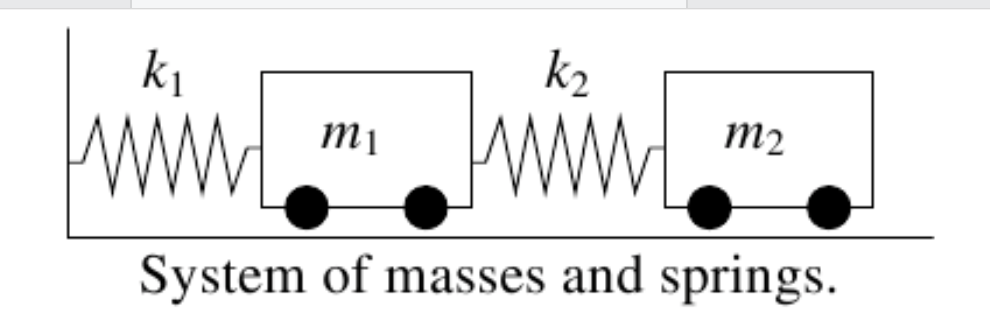
Consider a system of two toy railway cars (i.e., frictionless masses) connected to each other by two springs, one of which is attached to the wall, as shown in the figure. Let x₁ and x₂ be the displacement of the first and second masses from their equilibrium positions. Suppose the masses are m₁ 10 kg and = m2 5 kg, and the spring constants are k₁ 180 N/m and k₂ = 90 N/m. = x = a. Set up a system of second-order differential equations that models this situation. -27 7.2 9 -18 = x www System
Consider a system of two toy railway cars (i.e., frictionless masses) connected to each other by two springs, one of which is attached to the wall, as shown in the figure. Let x₁ and x₂ be the displacement of the first and second masses from their equilibrium positions. Suppose the masses are m₁ 10 kg and = m2 5 kg, and the spring constants are k₁ 180 N/m and k₂ = 90 N/m. = x = a. Set up a system of second-order differential equations that models this situation. -27 7.2 9 -18 = x www System

Related questions
Question
Transcribed Image Text:k₁
m₁
k₂
m₂
System of masses and springs.

Transcribed Image Text:Consider a system of two toy railway cars (i.e., frictionless masses) connected
to each other by two springs, one of which is attached to the wall, as shown in
the figure. Let x₁ and x₂ be the displacement of the first and second masses
from their equilibrium positions. Suppose the masses are m₁ = 10 kg and
m₂ =
5 kg, and the spring constants are k₁ = 180 N/m and k₂ = 90 N/m.
a. Set up a system of second-order differential equations that models this situation.
X
=
-27
7.2
9
-18
X
k₁
T^^^^^.
PW
T^^^^.
PWWWV
System of masses and springs.
b. Find the general solution to this system of differential equations. Use a₁, a2, b₁, b2 to
denote arbitrary constants, and enter them as a1, a2, b1, b2.
x₁ (t) = (1/2)a1 cos(3t)+(1/2)b1sin(3t)-a2cos(6t)-b2sin(6t)
x₂(t) = a1cos(3t)+b1sin(3t)+a2cos(6t)+b2sin(6t)
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

Step by step
Solved in 2 steps with 1 images
