ing techniques from Chapter 5, we can show that det(C) = -59. Since the minant of the coefficient matrix C is nonzero, it follows from Theorem 5.7 (the Big rem, Version 7) in Section 5.2 that our linear system has only the trivial solution. efore V is a linearly independent set and is a basis for P. DAVID I the set V could pos- 10, VRx2 11. V- ((1,0, 0, 0, 0, ...), (1,-1, 0, 0, 0, ...) (1,-1, 1, 0,0,.), (1,-1, 1,-1,0,...),. ., VR 12. (1, x+ 1, x+x+1, x+ x2+ x+ 1. ). V=P V P VR2 For Exercises 13-18, find a basis for the subspace S and determine dim(S). 13. S is the subspace of R consisting of matrices with trace equal to zero, (The trace is the sum of the diagonal terms of a matrix.) VRx2 14. S is the subspace of P2 consisting of polynomials with graphs crossing the origin. 15. S is the subspace of R2x2 consisting of matrices with compo- basis for V. nents that add to zero. 16. S is the subspace of T(2, 2) consisting of linear transforma- tions T: R R2 such that T (x) = ax for some scalar a. + 1, V= P 17. S is the subspace of T(2, 2) consisting of linear transforma- tions T: R VRx2 R such that T(v) = 0 for a specific vector v.
ing techniques from Chapter 5, we can show that det(C) = -59. Since the minant of the coefficient matrix C is nonzero, it follows from Theorem 5.7 (the Big rem, Version 7) in Section 5.2 that our linear system has only the trivial solution. efore V is a linearly independent set and is a basis for P. DAVID I the set V could pos- 10, VRx2 11. V- ((1,0, 0, 0, 0, ...), (1,-1, 0, 0, 0, ...) (1,-1, 1, 0,0,.), (1,-1, 1,-1,0,...),. ., VR 12. (1, x+ 1, x+x+1, x+ x2+ x+ 1. ). V=P V P VR2 For Exercises 13-18, find a basis for the subspace S and determine dim(S). 13. S is the subspace of R consisting of matrices with trace equal to zero, (The trace is the sum of the diagonal terms of a matrix.) VRx2 14. S is the subspace of P2 consisting of polynomials with graphs crossing the origin. 15. S is the subspace of R2x2 consisting of matrices with compo- basis for V. nents that add to zero. 16. S is the subspace of T(2, 2) consisting of linear transforma- tions T: R R2 such that T (x) = ax for some scalar a. + 1, V= P 17. S is the subspace of T(2, 2) consisting of linear transforma- tions T: R VRx2 R such that T(v) = 0 for a specific vector v.

Linear Algebra: A Modern Introduction
4th Edition
ISBN:9781285463247
Author:David Poole
Publisher:David Poole
Chapter2: Systems Of Linear Equations
Section2.2: Direct Methods For Solving Linear Systems
Problem 1CEXP

Related questions

Question
For Problem #12, how do I prove that the set is a basis for V? I think that infinity is the basis, but I'm not sure. This is a
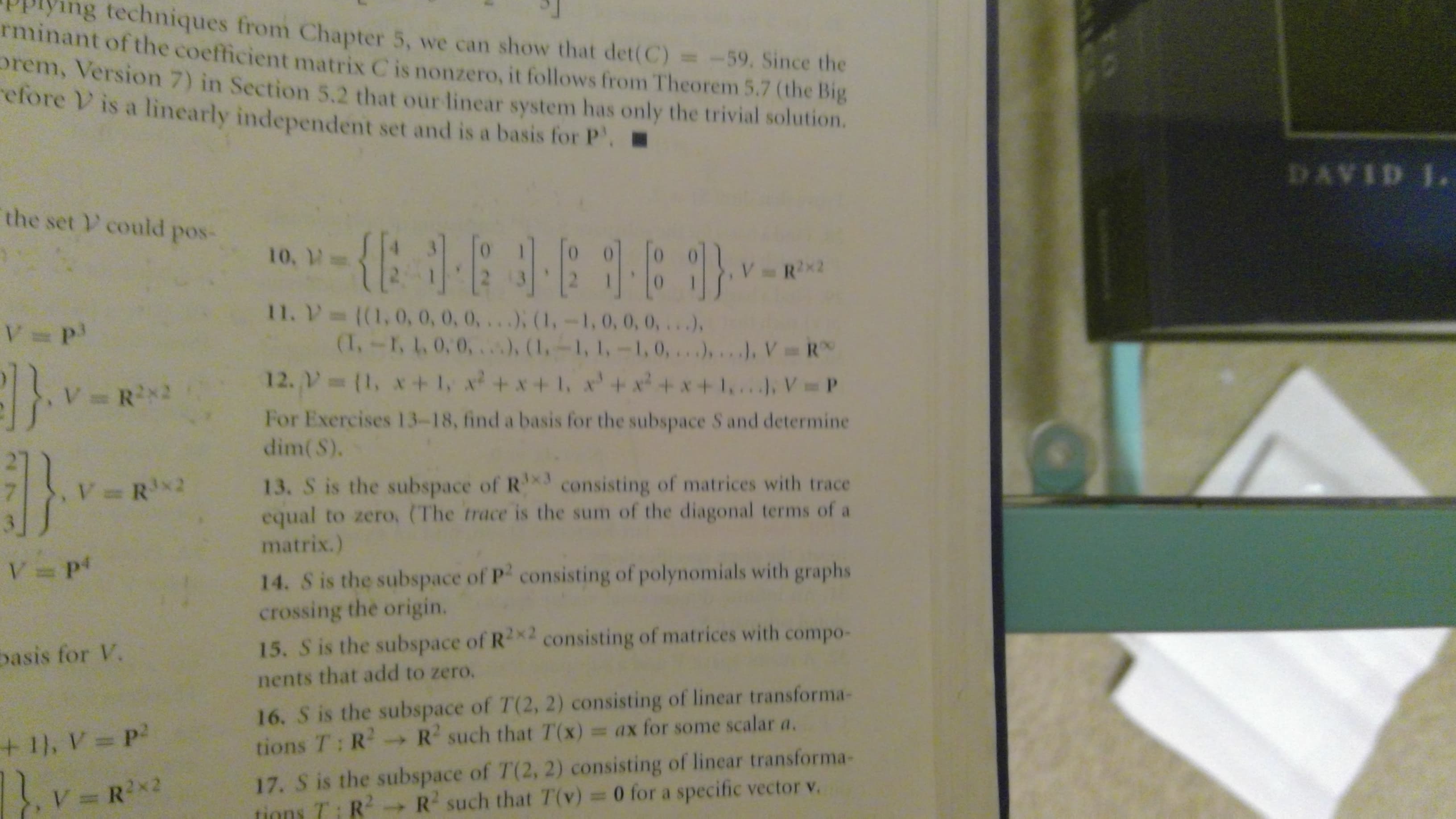
Transcribed Image Text:ing techniques from Chapter 5, we can show that det(C) = -59. Since the
minant of the coefficient matrix C is nonzero, it follows from Theorem 5.7 (the Big
rem, Version 7) in Section 5.2 that our linear system has only the trivial solution.
efore V is a linearly independent set and is a basis for P.
DAVID I
the set V could pos-
10,
VRx2
11. V- ((1,0, 0, 0, 0, ...), (1,-1, 0, 0, 0, ...)
(1,-1, 1, 0,0,.), (1,-1, 1,-1,0,...),. ., VR
12. (1, x+ 1, x+x+1, x+ x2+ x+ 1. ). V=P
V P
VR2
For Exercises 13-18, find a basis for the subspace S and determine
dim(S).
13. S is the subspace of R consisting of matrices with trace
equal to zero, (The trace is the sum of the diagonal terms of a
matrix.)
VRx2
14. S is the subspace of P2 consisting of polynomials with graphs
crossing the origin.
15. S is the subspace of R2x2 consisting of matrices with compo-
basis for V.
nents that add to zero.
16. S is the subspace of T(2, 2) consisting of linear transforma-
tions T: R R2 such that T (x) = ax for some scalar a.
+ 1, V= P
17. S is the subspace of T(2, 2) consisting of linear transforma-
tions T: R
VRx2
R such that T(v) = 0 for a specific vector v.
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

This is a popular solution!

Trending now
This is a popular solution!

Step by step
Solved in 2 steps with 2 images

Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, advanced-math and related others by exploring similar questions and additional content below.Recommended textbooks for you
Linear Algebra: A Modern Introduction
Algebra
ISBN:
9781285463247
Author:
David Poole
Publisher:
Cengage Learning

Algebra & Trigonometry with Analytic Geometry
Algebra
ISBN:
9781133382119
Author:
Swokowski
Publisher:
Cengage

College Algebra
Algebra
ISBN:
9781305115545
Author:
James Stewart, Lothar Redlin, Saleem Watson
Publisher:
Cengage Learning
Linear Algebra: A Modern Introduction
Algebra
ISBN:
9781285463247
Author:
David Poole
Publisher:
Cengage Learning
Algebra & Trigonometry with Analytic Geometry
Algebra
ISBN:
9781133382119
Author:
Swokowski
Publisher:
Cengage
College Algebra
Algebra
ISBN:
9781305115545
Author:
James Stewart, Lothar Redlin, Saleem Watson
Publisher:
Cengage Learning

Algebra and Trigonometry (MindTap Course List)
Algebra
ISBN:
9781305071742
Author:
James Stewart, Lothar Redlin, Saleem Watson
Publisher:
Cengage Learning