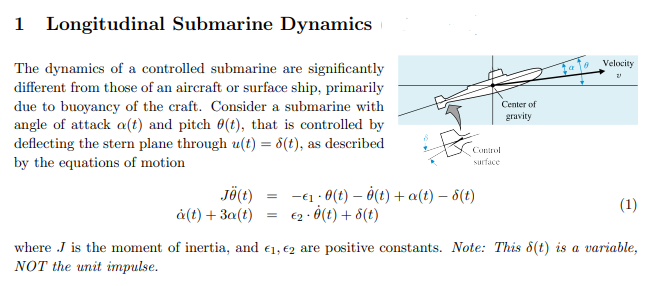
Longitudinal Submarine Dynamics Velocity The dynamics of a controlled submarine are significantly different from those of an aircraft or surface ship, primarily due to buoyancy of the craft. Consider a submarine with angle of attack a(t) and pitch 0(t), that is controlled by deflecting the stern plane through u(t) = 8(t), as described by the equations of motion Center of gravity Coptrol surface JÖ(t) à(t) + 3a(t) -€1 : 0(t) – 0(t) + a(t) – 6(t) €2 · Ö(t) + 8(t) (1) where J is the moment of inertia, and €1, €2 are positive constants. Note: This 8(t) is a variable, NOT the unit impulse.
Longitudinal Submarine Dynamics Velocity The dynamics of a controlled submarine are significantly different from those of an aircraft or surface ship, primarily due to buoyancy of the craft. Consider a submarine with angle of attack a(t) and pitch 0(t), that is controlled by deflecting the stern plane through u(t) = 8(t), as described by the equations of motion Center of gravity Coptrol surface JÖ(t) à(t) + 3a(t) -€1 : 0(t) – 0(t) + a(t) – 6(t) €2 · Ö(t) + 8(t) (1) where J is the moment of inertia, and €1, €2 are positive constants. Note: This 8(t) is a variable, NOT the unit impulse.

Introductory Circuit Analysis (13th Edition)
13th Edition
ISBN:9780133923605
Author:Robert L. Boylestad
Publisher:Robert L. Boylestad
Chapter1: Introduction
Section: Chapter Questions
Problem 1P: Visit your local library (at school or home) and describe the extent to which it provides literature...

Related questions
Question
Subject: Control System
Transcribed Image Text:Longitudinal Submarine Dynamics
Velocity
The dynamics of a controlled submarine are significantly
different from those of an aircraft or surface ship, primarily
due to buoyancy of the craft. Consider a submarine with
angle of attack a(t) and pitch 0(t), that is controlled by
deflecting the stern plane through u(t) = 8(t), as described
by the equations of motion
Center of
gravity
Coptrol
surface
JÖ(t)
à(t) + 3a(t)
-€1 : 0(t) – 0(t) + a(t) – 6(t)
€2 · Ö(t) + 8(t)
(1)
where J is the moment of inertia, and €1, €2 are positive constants. Note: This 8(t) is a variable,
NOT the unit impulse.
![1.
Which one of the following correctly describes the system in state-space form,
0(t)
with state vector x(t) =
input u(t) = 6(t), and output y(t) = 0(t)?
a(t)
0 1
0 1/J €1/J
0 0], D = 0.
(a) A =
B =
€2
-3
1.
1.
(b) А —
1/J
-1/J
,C = [ 1 0 0], D = 0.
B =
-3
€2
(c) A
-1/J 1/J -€2/J
, C = [ €2_ 0 0], D = 0.
B =
-3
€1
1
(d) A =
-€1/J -1/J 1/J
0 0], D= 0.
B=
€2
-3](/v2/_next/image?url=https%3A%2F%2Fcontent.bartleby.com%2Fqna-images%2Fquestion%2F601199b7-107a-49ea-a858-25f85341abea%2F94f4ee3b-4c14-411d-bceb-c2d15a78a20c%2Fy17hqmq_processed.png&w=3840&q=75)
Transcribed Image Text:1.
Which one of the following correctly describes the system in state-space form,
0(t)
with state vector x(t) =
input u(t) = 6(t), and output y(t) = 0(t)?
a(t)
0 1
0 1/J €1/J
0 0], D = 0.
(a) A =
B =
€2
-3
1.
1.
(b) А —
1/J
-1/J
,C = [ 1 0 0], D = 0.
B =
-3
€2
(c) A
-1/J 1/J -€2/J
, C = [ €2_ 0 0], D = 0.
B =
-3
€1
1
(d) A =
-€1/J -1/J 1/J
0 0], D= 0.
B=
€2
-3
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

Step by step
Solved in 3 steps with 2 images

Recommended textbooks for you
Introductory Circuit Analysis (13th Edition)
Electrical Engineering
ISBN:
9780133923605
Author:
Robert L. Boylestad
Publisher:
PEARSON

Delmar's Standard Textbook Of Electricity
Electrical Engineering
ISBN:
9781337900348
Author:
Stephen L. Herman
Publisher:
Cengage Learning

Programmable Logic Controllers
Electrical Engineering
ISBN:
9780073373843
Author:
Frank D. Petruzella
Publisher:
McGraw-Hill Education
Introductory Circuit Analysis (13th Edition)
Electrical Engineering
ISBN:
9780133923605
Author:
Robert L. Boylestad
Publisher:
PEARSON
Delmar's Standard Textbook Of Electricity
Electrical Engineering
ISBN:
9781337900348
Author:
Stephen L. Herman
Publisher:
Cengage Learning
Programmable Logic Controllers
Electrical Engineering
ISBN:
9780073373843
Author:
Frank D. Petruzella
Publisher:
McGraw-Hill Education

Fundamentals of Electric Circuits
Electrical Engineering
ISBN:
9780078028229
Author:
Charles K Alexander, Matthew Sadiku
Publisher:
McGraw-Hill Education

Electric Circuits. (11th Edition)
Electrical Engineering
ISBN:
9780134746968
Author:
James W. Nilsson, Susan Riedel
Publisher:
PEARSON

Engineering Electromagnetics
Electrical Engineering
ISBN:
9780078028151
Author:
Hayt, William H. (william Hart), Jr, BUCK, John A.
Publisher:
Mcgraw-hill Education,