Note: If there are NO two degree of freedom pairs (i.e. higher pairs), then h = 0. We have (1) n= 3 (1- 1)- 2j It may be noted that (a) When n= 0, then the mechanism forms a structure and no relative motion between the links is possible, as shown in Fig. (a) and (d. (b) When n=1, then the mechanism can be driven by a single input motion, as shown in Fig. (6). (4 When n= 2, then two separate input motions are necessary to produce constrained motion for the mechanism, as shown in Fig. (4). (d When n= -1 or less, then there are redundant constraints in the chain and it forms a statically indeterminate structure, as shown in Fig. (e). ww.. A1B (a) Three-bar mechanism (b) Four bar mechanism. (c) Five bar mechanism ) Five bar hanism. (e) Six mechanism
Note: If there are NO two degree of freedom pairs (i.e. higher pairs), then h = 0. We have (1) n= 3 (1- 1)- 2j It may be noted that (a) When n= 0, then the mechanism forms a structure and no relative motion between the links is possible, as shown in Fig. (a) and (d. (b) When n=1, then the mechanism can be driven by a single input motion, as shown in Fig. (6). (4 When n= 2, then two separate input motions are necessary to produce constrained motion for the mechanism, as shown in Fig. (4). (d When n= -1 or less, then there are redundant constraints in the chain and it forms a statically indeterminate structure, as shown in Fig. (e). ww.. A1B (a) Three-bar mechanism (b) Four bar mechanism. (c) Five bar mechanism ) Five bar hanism. (e) Six mechanism

International Edition---engineering Mechanics: Statics, 4th Edition
4th Edition
ISBN:9781305501607
Author:Andrew Pytel And Jaan Kiusalaas
Publisher:Andrew Pytel And Jaan Kiusalaas
Chapter7: Dry Friction
Section: Chapter Questions
Problem 7.70P: Solve Sample Problem 7.16 if the contact pressure under the polisher varies parabolically from p0 at...

Related questions
Question
I need the answer as soon as possible
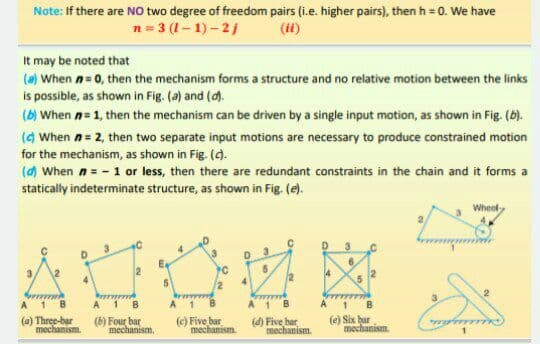
Transcribed Image Text:Note: If there are NO two degree of freedom pairs (i.e. higher pairs), then h = 0. We have
(1)
n= 3 (1– 1) – 2j
It may be noted that
(a) When n= 0, then the mechanism forms a structure and no relative motion between the links
is possible, as shown in Fig. (a) and (d).
(b) When n= 1, then the mechanism can be driven by a single input motion, as shown in Fig. (b).
(4 When n= 2, then two separate input motions are necessary to produce constrained motion
for the mechanism, as shown in Fig. (4.
(d) When n= - 1 or less, then there are redundant constraints in the chain and it forms a
statically indeterminate structure, as shown in Fig. (e).
Wheel
12
4.
A 1
B
A1 B
A 1
A1B
(a) Three-bar
mechanism.
(6) Four bar
mechanism,
(e) Five bar
mechanism.
(d) Five bar
mechanism.
(e) Six har
mechanism
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

Step by step
Solved in 2 steps

Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, mechanical-engineering and related others by exploring similar questions and additional content below.Recommended textbooks for you
International Edition---engineering Mechanics: St…
Mechanical Engineering
ISBN:
9781305501607
Author:
Andrew Pytel And Jaan Kiusalaas
Publisher:
CENGAGE L
International Edition---engineering Mechanics: St…
Mechanical Engineering
ISBN:
9781305501607
Author:
Andrew Pytel And Jaan Kiusalaas
Publisher:
CENGAGE L