Question 3 Based on the defined vectors, which one correctly shows d(LPA COS(B, +03)) dt a) -Lpa sin(B, +0,)o, + Lp, cos(B, +0,)@, RPA A b) -Lp, cos(B, + 0,)0, + LpĄ sin(ß, +0;)o, L2 R AO2 c) -Lpa sin(B, +0,)0, d) None
Question 3 Based on the defined vectors, which one correctly shows d(LPA COS(B, +03)) dt a) -Lpa sin(B, +0,)o, + Lp, cos(B, +0,)@, RPA A b) -Lp, cos(B, + 0,)0, + LpĄ sin(ß, +0;)o, L2 R AO2 c) -Lpa sin(B, +0,)0, d) None

International Edition---engineering Mechanics: Statics, 4th Edition
4th Edition
ISBN:9781305501607
Author:Andrew Pytel And Jaan Kiusalaas
Publisher:Andrew Pytel And Jaan Kiusalaas
Chapter1: Introduction To Statics
Section: Chapter Questions
Problem 1.12P: A differential equation encountered in the vibration of beams is d4ydx4=2D where x = distance...

Related questions
Question
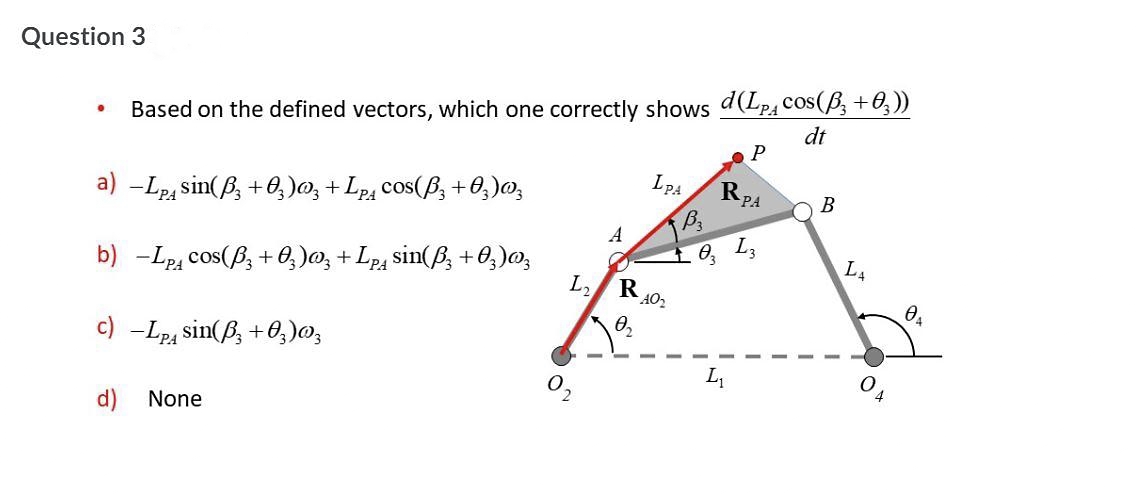
Transcribed Image Text:Question 3
Based on the defined vectors, which one correctly shows d(LpAcos(B, +0,))
dt
a) -Lp, sin(B, +0, )o, + Lp, cos(ß, +O,)0,
PA
В
A
1 0, L3
b) -Lp, cos(B; + 0, )0, + Lp4 sin(B, +0;)0,
L,
RA02
0,
c) -Lpa sin(B, +0,)0,
L
2.
d)
None
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

Step by step
Solved in 2 steps

Recommended textbooks for you
International Edition---engineering Mechanics: St…
Mechanical Engineering
ISBN:
9781305501607
Author:
Andrew Pytel And Jaan Kiusalaas
Publisher:
CENGAGE L
International Edition---engineering Mechanics: St…
Mechanical Engineering
ISBN:
9781305501607
Author:
Andrew Pytel And Jaan Kiusalaas
Publisher:
CENGAGE L