2) 5 Let P(A) = 2. Calculate the upper bound for P(U A;) using union bound (rounded to 3 decimal places). O 0.937 0.984 ○ 0.969 1 i=1 3) Which of the following is/are the shortcomings of TD Learning that Q-learning resolves? UTD learning cannot provide values for (state, action) pairs, limiting the ability to extract an optimal policy directly ☐ TD learning requires knowledge of the reward and transition functions, which is not always available ☐ TD learning is computationally expensive and slow compared to Q-learning TD learning often suffers from high variance in value estimation, leading to unstable learning TD learning cannot handle environments with continuous state and action spaces effectively
2) 5 Let P(A) = 2. Calculate the upper bound for P(U A;) using union bound (rounded to 3 decimal places). O 0.937 0.984 ○ 0.969 1 i=1 3) Which of the following is/are the shortcomings of TD Learning that Q-learning resolves? UTD learning cannot provide values for (state, action) pairs, limiting the ability to extract an optimal policy directly ☐ TD learning requires knowledge of the reward and transition functions, which is not always available ☐ TD learning is computationally expensive and slow compared to Q-learning TD learning often suffers from high variance in value estimation, leading to unstable learning TD learning cannot handle environments with continuous state and action spaces effectively

Operations Research : Applications and Algorithms
4th Edition
ISBN:9780534380588
Author:Wayne L. Winston
Publisher:Wayne L. Winston
Chapter19: Probabilistic Dynamic Programming
Section: Chapter Questions
Problem 4RP
Question
Alert dont submit
refref Image and solve all 2 question.
explain all option right answer and wrong answer.
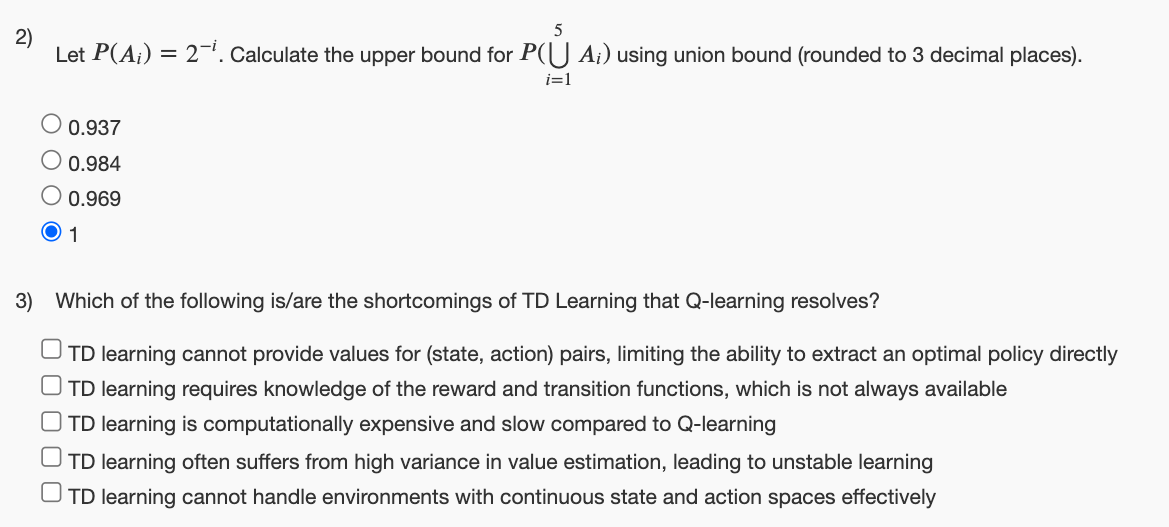
Transcribed Image Text:2)
5
Let P(A) = 2. Calculate the upper bound for P(U A;) using union bound (rounded to 3 decimal places).
O 0.937
0.984
○ 0.969
1
i=1
3) Which of the following is/are the shortcomings of TD Learning that Q-learning resolves?
UTD learning cannot provide values for (state, action) pairs, limiting the ability to extract an optimal policy directly
☐ TD learning requires knowledge of the reward and transition functions, which is not always available
☐ TD learning is computationally expensive and slow compared to Q-learning
TD learning often suffers from high variance in value estimation, leading to unstable learning
TD learning cannot handle environments with continuous state and action spaces effectively
AI-Generated Solution

Unlock instant AI solutions
Tap the button
to generate a solution
Recommended textbooks for you
Operations Research : Applications and Algorithms
Computer Science
ISBN:
9780534380588
Author:
Wayne L. Winston
Publisher:
Brooks Cole
Operations Research : Applications and Algorithms
Computer Science
ISBN:
9780534380588
Author:
Wayne L. Winston
Publisher:
Brooks Cole