A robot arm must accelerate to be extended. Constant-acceleration motion is simple to analyze but rarely applies in the real world because acceleration cannot be instantly turned on and off. Robot designers have found that motion can be both practical (implemented by software and real motors) and sufficiently smooth if it has constant jerk. Just as velocity is the time derivative of position and acceleration is the time derivate of velocity, jerk is defined to be the time derivative of Unlis Submit Part C daz How far has the arm moved forward at the end of this interval? acceleration. That is, jerk jz is the rate of dt change of acceleration, a name that comes from the fact that motion with a changing acceleration can be quite jerky. Motion with constant jerk is motion in which the acceleration has a constant rate of change. Express your answer with the appropriate units. > View Available Hint(s) HA Ax = Value Units Submit
A robot arm must accelerate to be extended. Constant-acceleration motion is simple to analyze but rarely applies in the real world because acceleration cannot be instantly turned on and off. Robot designers have found that motion can be both practical (implemented by software and real motors) and sufficiently smooth if it has constant jerk. Just as velocity is the time derivative of position and acceleration is the time derivate of velocity, jerk is defined to be the time derivative of Unlis Submit Part C daz How far has the arm moved forward at the end of this interval? acceleration. That is, jerk jz is the rate of dt change of acceleration, a name that comes from the fact that motion with a changing acceleration can be quite jerky. Motion with constant jerk is motion in which the acceleration has a constant rate of change. Express your answer with the appropriate units. > View Available Hint(s) HA Ax = Value Units Submit

Physics for Scientists and Engineers
10th Edition
ISBN:9781337553278
Author:Raymond A. Serway, John W. Jewett
Publisher:Raymond A. Serway, John W. Jewett
Chapter6: Circular Motion And Other Applications Of Newton's Laws
Section: Chapter Questions
Problem 39AP: Galileo thought about whether acceleration should be defined as the rate of change of velocity over...

Related questions
Question
Transcribed Image Text:Review Constants
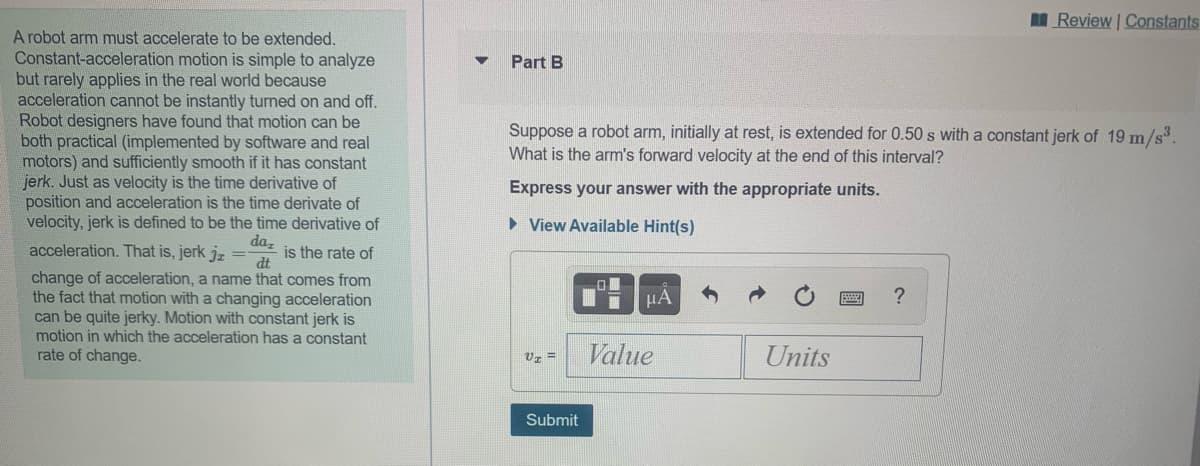
A robot arm must accelerate to be extended.
Constant-acceleration motion is simple to analyze
but rarely applies in the real world because
acceleration cannot be instantly turned on and off.
Robot designers have found that motion can be
both practical (implemented by software and real
motors) and sufficiently smooth if it has constant
jerk. Just as velocity is the time derivative of
position and acceleration is the time derivate of
velocity, jerk is defined to be the time derivative of
Part B
Suppose a robot arm, initially at rest, is extended for 0.50 s witha constant jerk of 19 m/s3.
What is the arm's forward velocity at the end of this interval?
Express your answer with the appropriate units.
• View Available Hint(s)
da,
is the rate of
dt
acceleration. That is, jerk jz =
change of acceleration, a name that comes from
the fact that motion with a changing acceleration
can be quite jerky. Motion with constant jerk is
motion in which the acceleration has a constant
rate of change.
µA
vz =
Value
Units
Submit
Transcribed Image Text:UT -
rUTuE
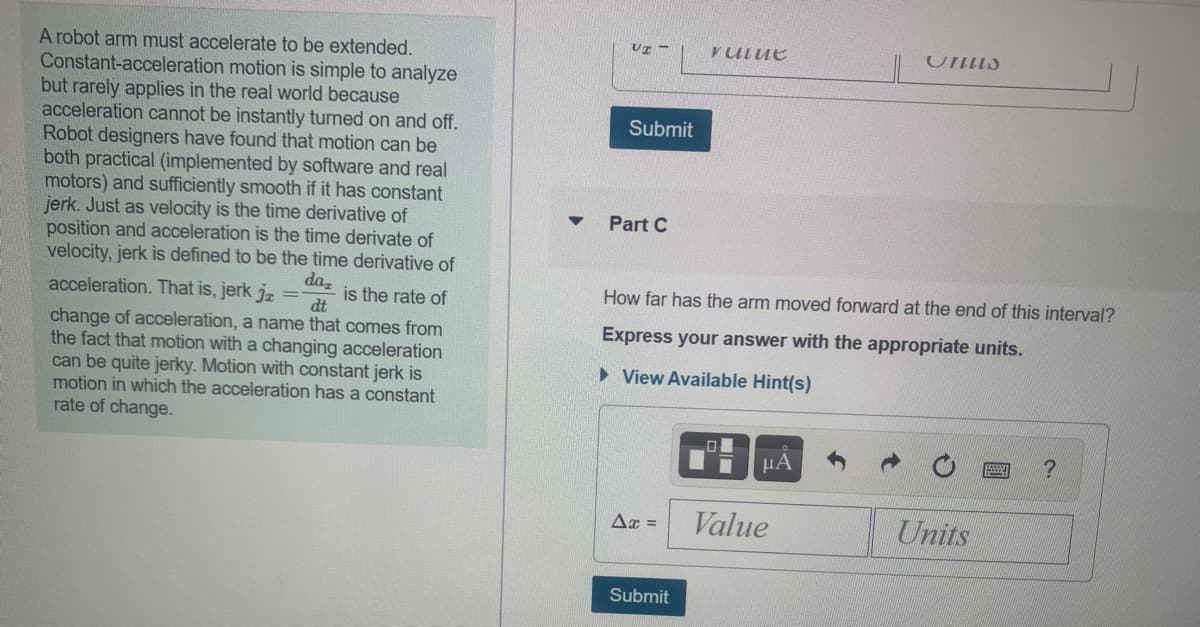
A robot arm must accelerate to be extended.
Constant-acceleration motion is simple to analyze
but rarely applies in the real world because
acceleration cannot be instantly turned on and off.
Robot designers have found that motion can be
both practical (implemented by software and real
motors) and sufficiently smooth if it has constant
jerk. Just as velocity is the time derivative of
position and acceleration is the time derivate of
velocity, jerk is defined to be the time derivative of
Unlis
Submit
Part C
da,
is the rate of
dt
acceleration. That is, jerk jz
How far has the arm moved forward at the end of this interval?
change of acceleration, a name that comes from
the fact that motion with a changing acceleration
can be quite jerky. Motion with constant jerk is
motion in which the acceleration has a constant
rate of change.
Express your answer with the appropriate units.
> View Available Hint(s)
HA
Ax =
Value
Units
Submit
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

This is a popular solution!

Trending now
This is a popular solution!

Step by step
Solved in 2 steps with 2 images

Recommended textbooks for you
Physics for Scientists and Engineers
Physics
ISBN:
9781337553278
Author:
Raymond A. Serway, John W. Jewett
Publisher:
Cengage Learning
Physics for Scientists and Engineers with Modern …
Physics
ISBN:
9781337553292
Author:
Raymond A. Serway, John W. Jewett
Publisher:
Cengage Learning
University Physics Volume 1
Physics
ISBN:
9781938168277
Author:
William Moebs, Samuel J. Ling, Jeff Sanny
Publisher:
OpenStax - Rice University
Physics for Scientists and Engineers
Physics
ISBN:
9781337553278
Author:
Raymond A. Serway, John W. Jewett
Publisher:
Cengage Learning
Physics for Scientists and Engineers with Modern …
Physics
ISBN:
9781337553292
Author:
Raymond A. Serway, John W. Jewett
Publisher:
Cengage Learning
University Physics Volume 1
Physics
ISBN:
9781938168277
Author:
William Moebs, Samuel J. Ling, Jeff Sanny
Publisher:
OpenStax - Rice University
College Physics
Physics
ISBN:
9781938168000
Author:
Paul Peter Urone, Roger Hinrichs
Publisher:
OpenStax College

Physics for Scientists and Engineers: Foundations…
Physics
ISBN:
9781133939146
Author:
Katz, Debora M.
Publisher:
Cengage Learning

Principles of Physics: A Calculus-Based Text
Physics
ISBN:
9781133104261
Author:
Raymond A. Serway, John W. Jewett
Publisher:
Cengage Learning