Consider the following system: 7(s+1) (s+4)2(s2+2s+3) Y(S) %3D U(S) 1. Calculate the time domain response of this system 2. Get the response characteristics of this system 3. Calculate the boundary results of this system
Consider the following system: 7(s+1) (s+4)2(s2+2s+3) Y(S) %3D U(S) 1. Calculate the time domain response of this system 2. Get the response characteristics of this system 3. Calculate the boundary results of this system

Power System Analysis and Design (MindTap Course List)
6th Edition
ISBN:9781305632134
Author:J. Duncan Glover, Thomas Overbye, Mulukutla S. Sarma
Publisher:J. Duncan Glover, Thomas Overbye, Mulukutla S. Sarma
Chapter6: Power Flows
Section: Chapter Questions
Problem 6.16P

Related questions
Question
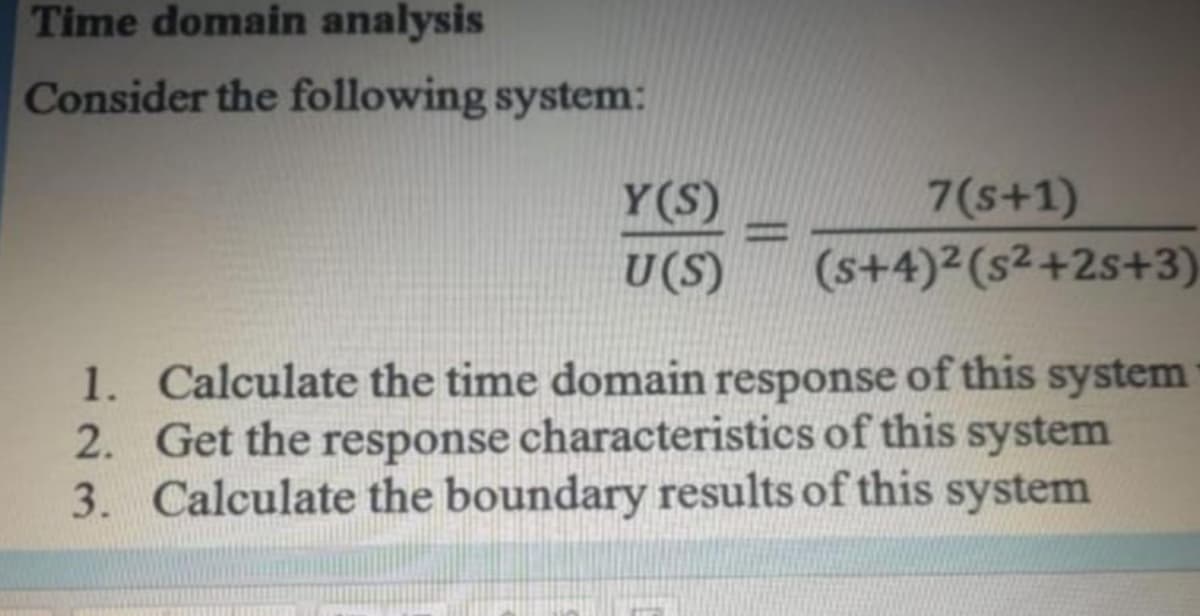
Transcribed Image Text:Time domain analysis
Consider the following system:
Y(S)
U(S)
7(s+1)
(s+4)2(s2+2s+3)
%3D
1. Calculate the time domain response of this system
2. Get the response characteristics of this system
3. Calculate the boundary results of this system
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

Step by step
Solved in 4 steps with 1 images

Recommended textbooks for you
Power System Analysis and Design (MindTap Course …
Electrical Engineering
ISBN:
9781305632134
Author:
J. Duncan Glover, Thomas Overbye, Mulukutla S. Sarma
Publisher:
Cengage Learning
Power System Analysis and Design (MindTap Course …
Electrical Engineering
ISBN:
9781305632134
Author:
J. Duncan Glover, Thomas Overbye, Mulukutla S. Sarma
Publisher:
Cengage Learning