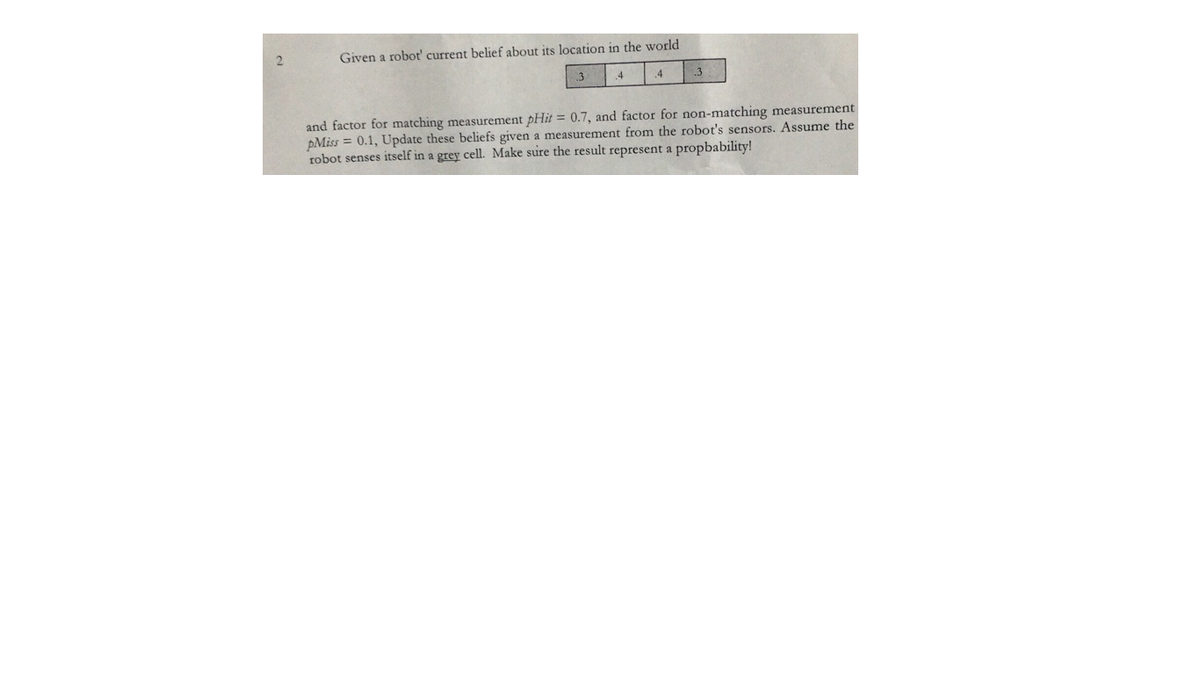
Given a robot' current belief about its location in the world 3 4 .4 and factor for matching measurement pHit = 0.7, and factor for non-matching measurement pMiss = 0.1, Update these beliefs given a measurement from the robot's sensors. Assume the robot senses itself in a grey cell. Make sure the result represent a propbability!
Given a robot' current belief about its location in the world 3 4 .4 and factor for matching measurement pHit = 0.7, and factor for non-matching measurement pMiss = 0.1, Update these beliefs given a measurement from the robot's sensors. Assume the robot senses itself in a grey cell. Make sure the result represent a propbability!

Big Ideas Math A Bridge To Success Algebra 1: Student Edition 2015
1st Edition
ISBN:9781680331141
Author:HOUGHTON MIFFLIN HARCOURT
Publisher:HOUGHTON MIFFLIN HARCOURT
Chapter11: Data Analysis And Displays
Section: Chapter Questions
Problem 1CA

Related questions
Topic Video
Question
Attached Question:
Transcribed Image Text:Given a robot' current belief about its location in the world
3
4
.4
and factor for matching measurement pHit = 0.7, and factor for non-matching measurement
pMiss = 0.1, Update these beliefs given a measurement from the robot's sensors. Assume the
robot senses itself in a grey cell. Make sure the result represent a propbability!
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

Step by step
Solved in 3 steps

Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, statistics and related others by exploring similar questions and additional content below.Recommended textbooks for you
Big Ideas Math A Bridge To Success Algebra 1: Stu…
Algebra
ISBN:
9781680331141
Author:
HOUGHTON MIFFLIN HARCOURT
Publisher:
Houghton Mifflin Harcourt
Big Ideas Math A Bridge To Success Algebra 1: Stu…
Algebra
ISBN:
9781680331141
Author:
HOUGHTON MIFFLIN HARCOURT
Publisher:
Houghton Mifflin Harcourt