gue. Assume that the rod is massless, perfectly rigid, and pivoted at point P. When the rod is perfectly horizontal, the angle 0 = 0, the displacement y = 0, and the springs are in neither tension nor compression. Gravity acts on the system (e.g. on mass M). We assume that y is a small displacement. A mass M is attached at the end of the rod. E k 3k a M Your tasks: A Derive an equation of motion for the system in terms of the angular displacement 0, and its derivatives (you should not have y or its derivatives in this equation.) B Derive an equation of motion for the system in terms of the displacement y, and its derivatives (you should not have or its derivatives in this equation. C Assuming there is no external actuator force F acting on the system, write down the total energy H of the system in terms of 0,0 and element constants. Derive an expression for the time derivative H of the total energy. (4 D Transform the equation from part B, which is in y, to another variable, z, which is zero at the static equilibrium position. ("Gravity Trick") E Assume now the system has aged and the bearings have worn out, so that you have a damping torque applied at the origin, Be in the direction opposite of theta. Give the new equation of motion in z. You may derive it again from scratch or use another approach, but you must justify your method
gue. Assume that the rod is massless, perfectly rigid, and pivoted at point P. When the rod is perfectly horizontal, the angle 0 = 0, the displacement y = 0, and the springs are in neither tension nor compression. Gravity acts on the system (e.g. on mass M). We assume that y is a small displacement. A mass M is attached at the end of the rod. E k 3k a M Your tasks: A Derive an equation of motion for the system in terms of the angular displacement 0, and its derivatives (you should not have y or its derivatives in this equation.) B Derive an equation of motion for the system in terms of the displacement y, and its derivatives (you should not have or its derivatives in this equation. C Assuming there is no external actuator force F acting on the system, write down the total energy H of the system in terms of 0,0 and element constants. Derive an expression for the time derivative H of the total energy. (4 D Transform the equation from part B, which is in y, to another variable, z, which is zero at the static equilibrium position. ("Gravity Trick") E Assume now the system has aged and the bearings have worn out, so that you have a damping torque applied at the origin, Be in the direction opposite of theta. Give the new equation of motion in z. You may derive it again from scratch or use another approach, but you must justify your method

International Edition---engineering Mechanics: Statics, 4th Edition
4th Edition
ISBN:9781305501607
Author:Andrew Pytel And Jaan Kiusalaas
Publisher:Andrew Pytel And Jaan Kiusalaas
Chapter10: Virtual Work And Potential Energy
Section: Chapter Questions
Problem 10.62P: The bar ABC is supported by three identical, ideal springs. Note that the springs are always...

Related questions

Question
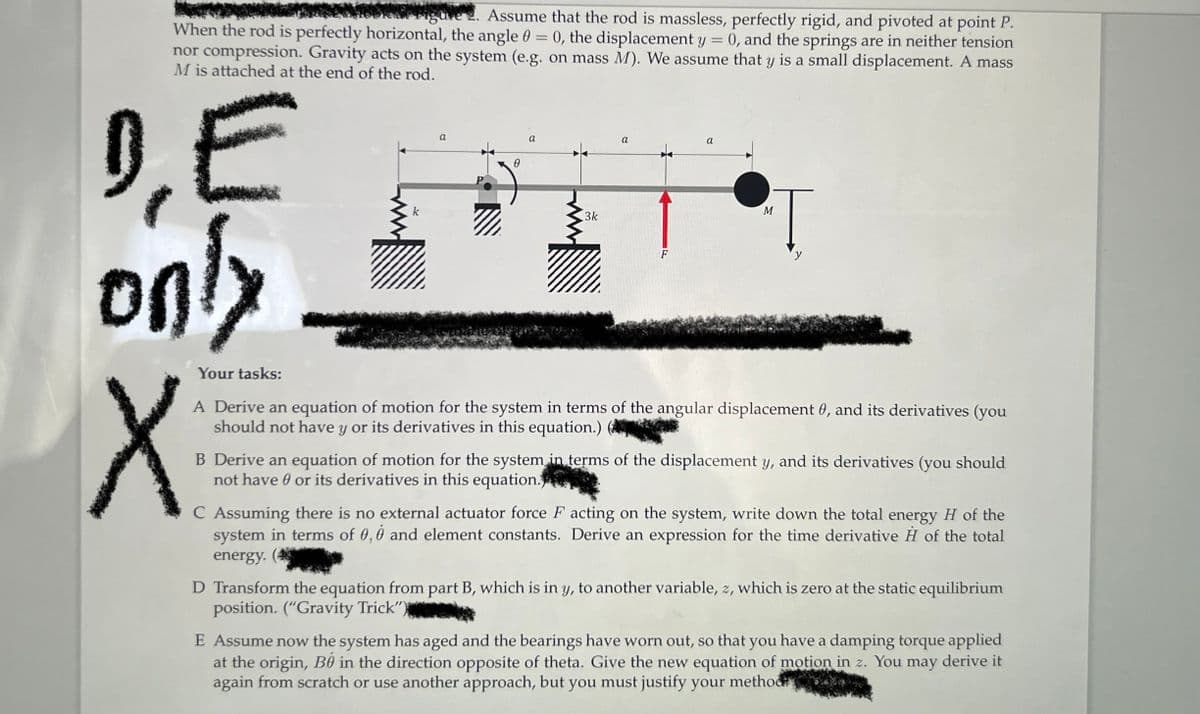
Transcribed Image Text:igure 2. Assume that the rod is massless, perfectly rigid, and pivoted at point P.
When the rod is perfectly horizontal, the angle 0 = 0, the displacement y 0, and the springs are in neither tension
nor compression. Gravity acts on the system (e.g. on mass M). We assume that y is a small displacement. A mass
M is attached at the end of the rod.
DE
only
225
Your tasks:
X
k
0
3k
a
F
a
M
y
A Derive an equation of motion for the system in terms of the angular displacement 0, and its derivatives (you
should not have y or its derivatives in this equation.)
B Derive an equation of motion for the system in terms of the displacement y, and its derivatives (you should
not have or its derivatives in this equation.
C Assuming there is no external actuator force F acting on the system, write down the total energy H of the
system in terms of 0,0 and element constants. Derive an expression for the time derivative H of the total
energy.
D Transform the equation from part B, which is in y, to another variable, z, which is zero at the static equilibrium
position. ("Gravity Trick")
E Assume now the system has aged and the bearings have worn out, so that you have a damping torque applied
at the origin, Be in the direction opposite of theta. Give the new equation of motion in z. You may derive it
again from scratch or use another approach, but you must justify your method
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

This is a popular solution!

Trending now
This is a popular solution!

Step by step
Solved in 7 steps with 19 images

Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, mechanical-engineering and related others by exploring similar questions and additional content below.Recommended textbooks for you
International Edition---engineering Mechanics: St…
Mechanical Engineering
ISBN:
9781305501607
Author:
Andrew Pytel And Jaan Kiusalaas
Publisher:
CENGAGE L

Mechanics of Materials (MindTap Course List)
Mechanical Engineering
ISBN:
9781337093347
Author:
Barry J. Goodno, James M. Gere
Publisher:
Cengage Learning
International Edition---engineering Mechanics: St…
Mechanical Engineering
ISBN:
9781305501607
Author:
Andrew Pytel And Jaan Kiusalaas
Publisher:
CENGAGE L
Mechanics of Materials (MindTap Course List)
Mechanical Engineering
ISBN:
9781337093347
Author:
Barry J. Goodno, James M. Gere
Publisher:
Cengage Learning