Many of the elements in horizontal-bar exercises can be modeled by representing the gymnast by four segments consisting of arms, torso (including the heäd), thighs, and lower legs, as SHOWH IN Figure (b). Inertial parameters for a particular gymnast are as follows. Segment Mass(kg) Length (m) reg (m) (kg-m2) Arms 6.87 0.520 0.239 0.205 0.601 0.374 Torso 35.90 0.337 1.680 Thighs Legs 12.60 0.187 0.173 7.24 0.227 1.580 Note that in Figure (b) rca is distance from the center of gravity of each segment to the joint closest to the bar (the bar is where the knuckles are, and the joint closest to the bar is not measured by distance, but by the position of the body, i.e. the torso-thigh joint is closer to the bar than the thigh-leg joint). I is the moment of inertia of each segment about its center of gravity. Calculate the position of the center of gravity of the gymnast shown. Pay close attention to the definition of rcg in the table. Xcg = Yeg = thigh leg 60° arm 60° torso (b)
Many of the elements in horizontal-bar exercises can be modeled by representing the gymnast by four segments consisting of arms, torso (including the heäd), thighs, and lower legs, as SHOWH IN Figure (b). Inertial parameters for a particular gymnast are as follows. Segment Mass(kg) Length (m) reg (m) (kg-m2) Arms 6.87 0.520 0.239 0.205 0.601 0.374 Torso 35.90 0.337 1.680 Thighs Legs 12.60 0.187 0.173 7.24 0.227 1.580 Note that in Figure (b) rca is distance from the center of gravity of each segment to the joint closest to the bar (the bar is where the knuckles are, and the joint closest to the bar is not measured by distance, but by the position of the body, i.e. the torso-thigh joint is closer to the bar than the thigh-leg joint). I is the moment of inertia of each segment about its center of gravity. Calculate the position of the center of gravity of the gymnast shown. Pay close attention to the definition of rcg in the table. Xcg = Yeg = thigh leg 60° arm 60° torso (b)

Physics for Scientists and Engineers: Foundations and Connections
1st Edition
ISBN:9781133939146
Author:Katz, Debora M.
Publisher:Katz, Debora M.
Chapter6: Applications Of Newton’s Laws Of Motion
Section: Chapter Questions
Problem 10PQ: A makeshift sign hangs by a wire that is extended over an ideal pulley and is wrapped around a large...

Related questions

Topic Video
Question
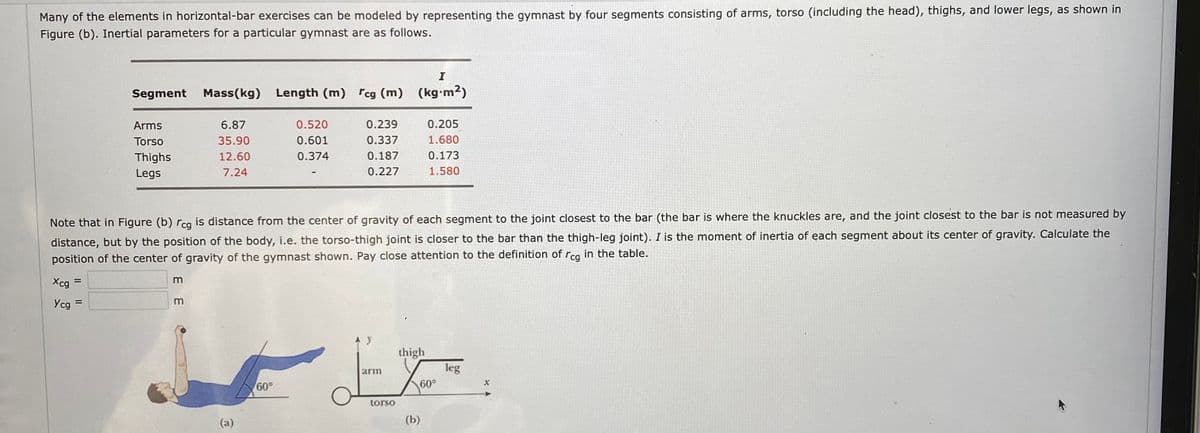
Transcribed Image Text:Many of the elements in horizontal-bar exercises can be modeled by representing the gymnast by four segments consisting of arms, torso (including the head), thighs, and lower legs, as shown in
Figure (b). Inertial parameters for a particular gymnast are as follows.
Segment
Mass(kg) Length (m) rcg (m) (kg•m²)
Arms
6.87
0.520
0.239
0.205
Torso
35.90
0.601
0.337
1.680
Thighs
12.60
0.374
0.187
0.173
Legs
7.24
0.227
1.580
Note that in Figure (b) rca is distance from the center of gravity of each segment to the joint closest to the bar (the bar is where the knuckles are, and the joint closest to the bar is not measured by
distance, but by the position of the body, i.e. the torso-thigh joint is closer to the bar than the thigh-leg joint). I is the moment of inertia of each segment about its center of gravity. Calculate the
position of the center of gravity of the gymnast shown. Pay close attention to the definition of rca in the table.
Xcg =
Ycg
%3D
thigh
leg
arm
60°
60°
torso
(a)
(b)
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

This is a popular solution!

Trending now
This is a popular solution!

Step by step
Solved in 4 steps with 4 images

Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, physics and related others by exploring similar questions and additional content below.Recommended textbooks for you
Physics for Scientists and Engineers: Foundations…
Physics
ISBN:
9781133939146
Author:
Katz, Debora M.
Publisher:
Cengage Learning
College Physics
Physics
ISBN:
9781938168000
Author:
Paul Peter Urone, Roger Hinrichs
Publisher:
OpenStax College
Physics for Scientists and Engineers: Foundations…
Physics
ISBN:
9781133939146
Author:
Katz, Debora M.
Publisher:
Cengage Learning
College Physics
Physics
ISBN:
9781938168000
Author:
Paul Peter Urone, Roger Hinrichs
Publisher:
OpenStax College