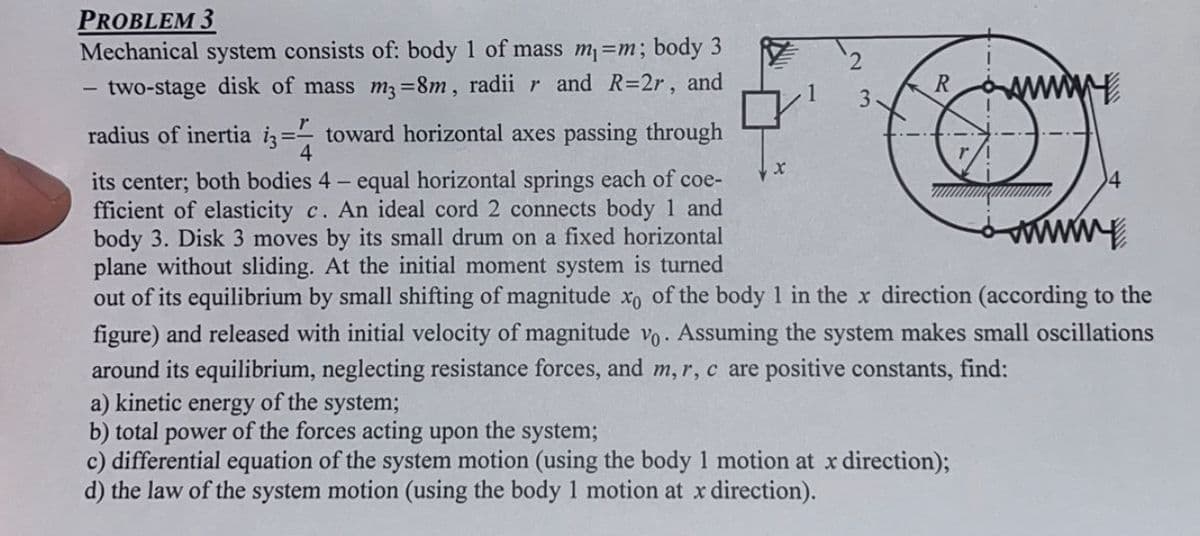
PROBLEM 3 Mechanical system consists of: body 1 of mass m₁ =m; body 3 two-stage disk of mass m3=8m, radii r and R=2r, and radius of inertia i3=toward horizontal axes passing through 4 2 3 R wwwwww its center; both bodies 4 equal horizontal springs each of coe- fficient of elasticity c. An ideal cord 2 connects body 1 and body 3. Disk 3 moves by its small drum on a fixed horizontal plane without sliding. At the initial moment system is turned out of its equilibrium by small shifting of magnitude xo of the body 1 in the x direction (according to the figure) and released with initial velocity of magnitude vo. Assuming the system makes small oscillations around its equilibrium, neglecting resistance forces, and m, r, c are positive constants, find: a) kinetic energy of the system; b) total power of the forces acting upon the system; c) differential equation of the system motion (using the body 1 motion at x direction); d) the law of the system motion (using the body 1 motion at x direction).
PROBLEM 3 Mechanical system consists of: body 1 of mass m₁ =m; body 3 two-stage disk of mass m3=8m, radii r and R=2r, and radius of inertia i3=toward horizontal axes passing through 4 2 3 R wwwwww its center; both bodies 4 equal horizontal springs each of coe- fficient of elasticity c. An ideal cord 2 connects body 1 and body 3. Disk 3 moves by its small drum on a fixed horizontal plane without sliding. At the initial moment system is turned out of its equilibrium by small shifting of magnitude xo of the body 1 in the x direction (according to the figure) and released with initial velocity of magnitude vo. Assuming the system makes small oscillations around its equilibrium, neglecting resistance forces, and m, r, c are positive constants, find: a) kinetic energy of the system; b) total power of the forces acting upon the system; c) differential equation of the system motion (using the body 1 motion at x direction); d) the law of the system motion (using the body 1 motion at x direction).

International Edition---engineering Mechanics: Statics, 4th Edition
4th Edition
ISBN:9781305501607
Author:Andrew Pytel And Jaan Kiusalaas
Publisher:Andrew Pytel And Jaan Kiusalaas
Chapter10: Virtual Work And Potential Energy
Section: Chapter Questions
Problem 10.60P: The weightless bars AB and CE, together with the 5-lb weight BE, form a parallelogram linkage. The...

Related questions
Question
Transcribed Image Text:PROBLEM 3
Mechanical system consists of: body 1 of mass m₁ =m; body 3
two-stage disk of mass m3-8m, radii r and R=2r, and
R
By
its center; both bodies 4 - equal horizontal springs each of coe-
fficient of elasticity c. An ideal cord 2 connects body 1 and
body 3. Disk 3 moves by its small drum on a fixed horizontal
plane without sliding. At the initial moment system is turned
www
out of its equilibrium by small shifting of magnitude xo of the body 1 in the x direction (according to the
figure) and released with initial velocity of magnitude vo. Assuming the system makes small oscillations
around its equilibrium, neglecting resistance forces, and m, r, c are positive constants, find:
r
radius of inertia i3=- toward horizontal axes passing through
4
2
X
3
a) kinetic energy of the system;
b) total power of the forces acting upon the system;
c) differential equation of the system motion (using the body 1 motion at x direction);
d) the law of the system motion (using the body 1 motion at x direction).
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

Step by step
Solved in 5 steps with 5 images

Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, mechanical-engineering and related others by exploring similar questions and additional content below.Recommended textbooks for you
International Edition---engineering Mechanics: St…
Mechanical Engineering
ISBN:
9781305501607
Author:
Andrew Pytel And Jaan Kiusalaas
Publisher:
CENGAGE L
International Edition---engineering Mechanics: St…
Mechanical Engineering
ISBN:
9781305501607
Author:
Andrew Pytel And Jaan Kiusalaas
Publisher:
CENGAGE L