SEhahon from R to R determined by (x1, x2) + (yı, y2), where %3D (*) Compute the Jacobian determinant of this transformation, and find the inverse (where it exists) by solving the system of equations in (+) for x1 and x2. Examine what the transformation does to the rectangle determined by 1 SIS2, 1/2 s x252/3. Draw a figure! 7. Consider the linear transformation T: (x, y) ► (u, v) from R² to R determined by u =. v = cx + dy, where a, b, c, and d are constants, not all equal to 0. Suppose the Jacobian determinant ofT is 0. Then, show that T maps the whole of R onto a straight line through the origin of the uv-plane. ax+by, O 8. Consider the transformation T:R? → R² defined by T(r, 8) = (r cos e,r sin 0). (a) Compute the Jacobian determinant J of T. (b) Let A be the domain in the (r, 0) plane determined by 1 2n. Show that J 0 in the whole of A, yet T is not one-to-one in A. 9. Give sufficient conditions on f and g to ensure that the equations (K x)8 = a '(K 'x)f = n can be solved for x and y locally. Show that if the solutions are x = F (4, v), y = G(u, v), and if f, g, F, and G are C', then se 1 xe r aF aG J ay ne %3! ng where J denotes the Jacobian determinant of f and g w.r.t u and v. M 10. (a) Consider the system of equations 1+ (x +y)u - (2+ u)!+" = 0 0 = (1-n(Kx + 11) - nz Use Theorem 2.7.2 to show that the system defines u and v as functions of x and y in an open ball around (x, y, u, v) = (1, 1, 1, 0). Find the values of the partial derivatives of the two functions w.r.t. x when x = 1, y = 1, u = 1, v = 0. %3D (b) Let a and b be arbitrary numbers in the interval [0, 1]. Use the intermediate value theorem (see e.g. EMEA, Section 7.10) to show that the equation 0 = (1-9»³D – n has a solution in the interval (0, 1]. Is the solution unique? (c) Show by using (b) that for any point (x, y), x E [0, 1], y e (0, 1, there exist solutions u and u of the SYstem. Are u and y uniquely determined?



Unitary Method
The word “unitary” comes from the word “unit”, which means a single and complete entity. In this method, we find the value of a unit product from the given number of products, and then we solve for the other number of products.
Speed, Time, and Distance
Imagine you and 3 of your friends are planning to go to the playground at 6 in the evening. Your house is one mile away from the playground and one of your friends named Jim must start at 5 pm to reach the playground by walk. The other two friends are 3 miles away.
Profit and Loss
The amount earned or lost on the sale of one or more items is referred to as the profit or loss on that item.
Units and Measurements
Measurements and comparisons are the foundation of science and engineering. We, therefore, need rules that tell us how things are measured and compared. For these measurements and comparisons, we perform certain experiments, and we will need the experiments to set up the devices.
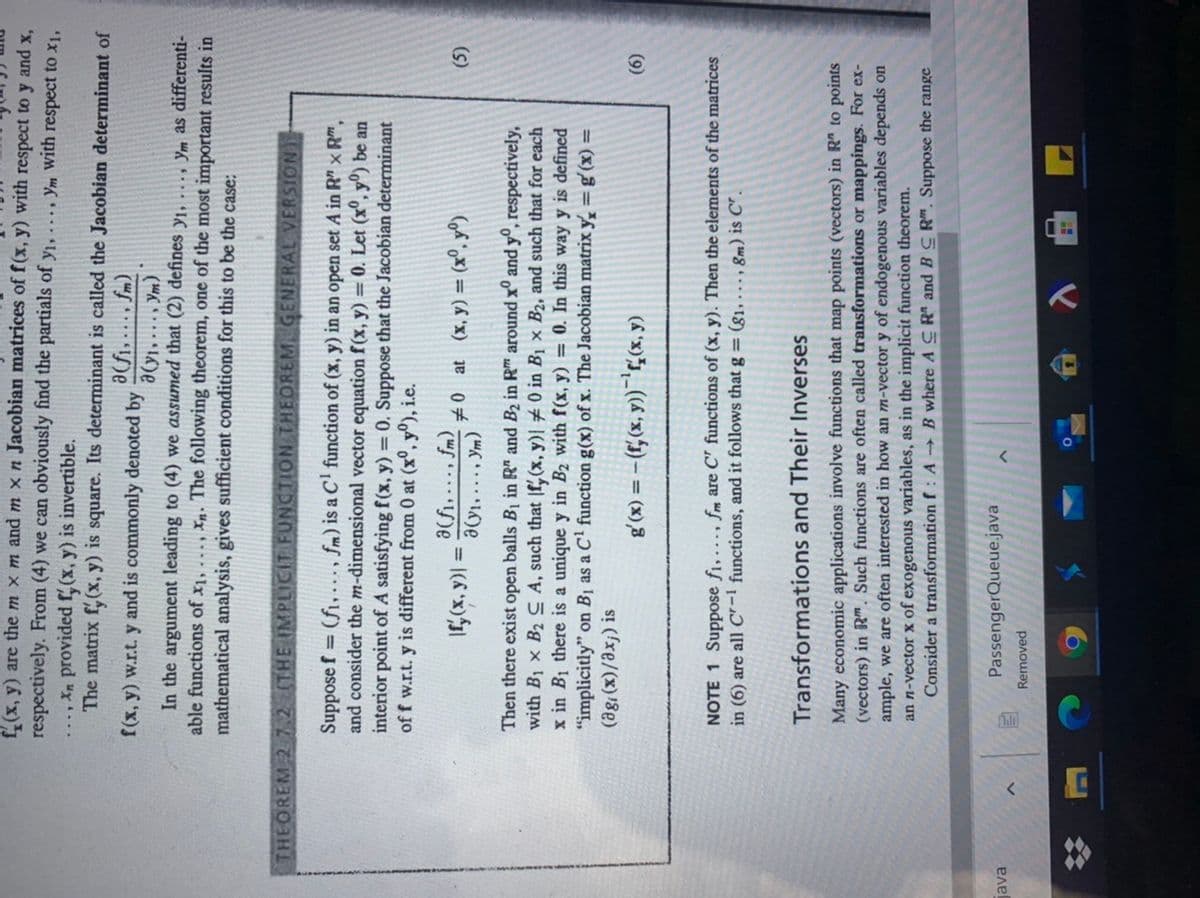
Can you help with question 10? I attached theorem 2.7.2!!
![SM 6. Consider the transformation from R? to R? determined by (x1, x2) → (yi, y2), where
Zylr = K
(*)
Compute the Jacobian determinant of this transformation, and find the inverse (where it exists)
by solving the system of equations in (*) for x1 and x2. Examine what the transformation does
to the rectangle determined by 1 sxI S2, 1/2 s x2 2/3. Draw a figure!
7. Consider the linear transformation T: (x, y) → (u, v) from R² to R² determined by u = ax+by,
v = cx + dy, where a, b, c, and d are constants, not all equal to 0. Suppose the Jacobian
determinant of T is 0. Then, show that T maps the whole of R? onto a straight line through the
origin of the uv-plane.
SM 8. Consider the transformation T: R → R defined by T(r, 8) = (r cos 0 , r sin 0).
(a) Compute the Jacobian determinant J of T.
(b) Let A be the domain in the (r, 0) plane determined by 1 <rS2 and 0 e [0, k], where
k > 27. Show that J 0 in the whole of A, yet T is not one-to-one in A.
9. Give sufficient conditions on f and g to ensure that the equations
u = f(x, y), v = g(x, y)
can be solved for x and y locally. Show that if the solutions are x = F (u, v), y = G(u, v), and
if f, g, F, and G are C', then
de
%3D
aG
8e I
ne
ne
where J denotes the Jacobian determinant of f and g w.r.t u and v.
M 10. (a) Consider the system of equations
1+ (x + y)u – (2 + u)'+v = 0
0 = (1-1)»³(Kx +1) – nz
Use Theorem 2.7.2 to show that the system defines u and v as functions of x and y in an
open ball around (x, y, u, v) = (1, 1, 1, 0). Find the values of the partial derivatives of the
two functions w.r.t. x when x = 1, y = 1, u = 1, v = 0.
(b) Let a and b be arbitrary numbers in the interval [0, 1]. Use the intermediate value theorem
(see e.
EMEA, Section 7.10) to show that the equation
has a solution in the interval (0, 1]. Is the solution unique?
(c) Show by using (b) that for any point (x, y), x e [0, 1], y e [0, 1], there exist solutions u
and v of the system. Are u and v uniquely determined?
PassengerQueue.java
er.java
Removed](/v2/_next/image?url=https%3A%2F%2Fcontent.bartleby.com%2Fqna-images%2Fquestion%2F3143ece0-b2b2-417b-825f-ab4e468fd03e%2F41058c4c-68f6-4af1-8ea5-f6d25d8da69c%2F05e2mpo_processed.jpeg&w=3840&q=75)


Trending now
This is a popular solution!

Step by step
Solved in 3 steps




