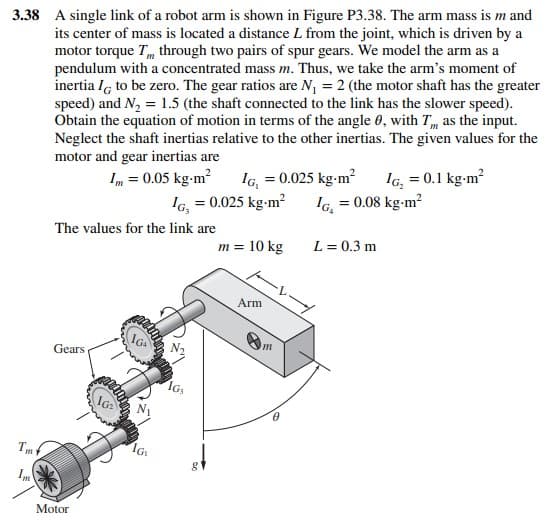
3.38 A single link of a robot arm is shown in Figure P3.38. The arm mass is m and its center of mass is located a distance L from the joint, which is driven by a motor torque T through two pairs of spur gears. We model the arm as a pendulum with a concentrated mass m. Thus, we take the arm's moment of inertial to be zero. The gear ratios are N₁ = 2 (the motor shaft has the greater speed) and N₂ = 1.5 (the shaft connected to the link has the slower speed). Obtain the equation of motion in terms of the angle 0, with T, as the input. Neglect the shaft inertias relative to the other inertias. The given values for the motor and gear inertias are 1m = 0.05 kg-m² IG, = 0.025 kg-m² IG₂ = 0.1 kg-m² IG, = 0.025 kg-m² IG₁ = 0.08 kg-m² Tmf Im The values for the link are Gears Motor 10₂ IGA IG 10₁ m = 10 kg Arm A m L = 0.3 m
3.38 A single link of a robot arm is shown in Figure P3.38. The arm mass is m and its center of mass is located a distance L from the joint, which is driven by a motor torque T through two pairs of spur gears. We model the arm as a pendulum with a concentrated mass m. Thus, we take the arm's moment of inertial to be zero. The gear ratios are N₁ = 2 (the motor shaft has the greater speed) and N₂ = 1.5 (the shaft connected to the link has the slower speed). Obtain the equation of motion in terms of the angle 0, with T, as the input. Neglect the shaft inertias relative to the other inertias. The given values for the motor and gear inertias are 1m = 0.05 kg-m² IG, = 0.025 kg-m² IG₂ = 0.1 kg-m² IG, = 0.025 kg-m² IG₁ = 0.08 kg-m² Tmf Im The values for the link are Gears Motor 10₂ IGA IG 10₁ m = 10 kg Arm A m L = 0.3 m

Principles of Heat Transfer (Activate Learning with these NEW titles from Engineering!)
8th Edition
ISBN:9781305387102
Author:Kreith, Frank; Manglik, Raj M.
Publisher:Kreith, Frank; Manglik, Raj M.
Chapter3: Transient Heat Conduction
Section: Chapter Questions
Problem 3.37P

Related questions
Question
100%
Transcribed Image Text:3.38 A single link of a robot arm is shown in Figure P3.38. The arm mass is m and
its center of mass is located a distance L from the joint, which is driven by a
motor torque T, through two pairs of spur gears. We model the arm as a
pendulum with a concentrated mass m. Thus, we take the arm's moment of
inertia I to be zero. The gear ratios are N₁ = 2 (the motor shaft has the greater
speed) and N₂ = 1.5 (the shaft connected to the link has the slower speed).
Obtain the equation of motion in terms of the angle 0, with T, as the input.
Neglect the shaft inertias relative to the other inertias. The given values for the
motor and gear inertias are
1m = 0.05 kg-m² IG, = 0.025 kg-m² IG₂ = 0.1 kg-m²
IG, = 0.025 kg-m² IG. = 0.08 kg-m²
Tmf
Im
The values for the link are
Gears
Motor
10₂
IGA
IG
1G₁
g
m = 10 kg
Arm
m
L = 0.3 m
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

This is a popular solution!

Trending now
This is a popular solution!

Step by step
Solved in 3 steps with 3 images

Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, mechanical-engineering and related others by exploring similar questions and additional content below.Recommended textbooks for you
Principles of Heat Transfer (Activate Learning wi…
Mechanical Engineering
ISBN:
9781305387102
Author:
Kreith, Frank; Manglik, Raj M.
Publisher:
Cengage Learning
Principles of Heat Transfer (Activate Learning wi…
Mechanical Engineering
ISBN:
9781305387102
Author:
Kreith, Frank; Manglik, Raj M.
Publisher:
Cengage Learning