t² y" + ty -y = vt %3D

Delmar's Standard Textbook Of Electricity
7th Edition
ISBN:9781337900348
Author:Stephen L. Herman
Publisher:Stephen L. Herman
Chapter14: Basic Trigonometry And Vectors
Section: Chapter Questions
Problem 5RQ: 5. The hypotenuse has a length of 65 in., and side A has a length of 31 in. What is angle X?

Related questions
Question
Find the general solution of the second order, inhomogeneous linear differential equation given below with the "Change of Parameters" method.
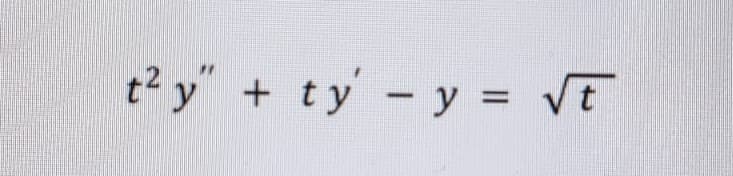
Transcribed Image Text:t² y" + ty -y = vt
%D
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

Step by step
Solved in 2 steps with 1 images

Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, electrical-engineering and related others by exploring similar questions and additional content below.Recommended textbooks for you
Delmar's Standard Textbook Of Electricity
Electrical Engineering
ISBN:
9781337900348
Author:
Stephen L. Herman
Publisher:
Cengage Learning
Delmar's Standard Textbook Of Electricity
Electrical Engineering
ISBN:
9781337900348
Author:
Stephen L. Herman
Publisher:
Cengage Learning