2- Assume a stiffness control for a single degree of freedom as follows. Environment Assume manipulator is in contact with environment whose position is x. Derive the control law to make Xa= Xe Where: Xe: the actual position. X: the instantons position. Xa: the desired position. fe: the force acting on environment. f: the input force.
2- Assume a stiffness control for a single degree of freedom as follows. Environment Assume manipulator is in contact with environment whose position is x. Derive the control law to make Xa= Xe Where: Xe: the actual position. X: the instantons position. Xa: the desired position. fe: the force acting on environment. f: the input force.

Chapter40: Push-button Synchronizing
Section: Chapter Questions
Problem 5SQ

Related questions
Question
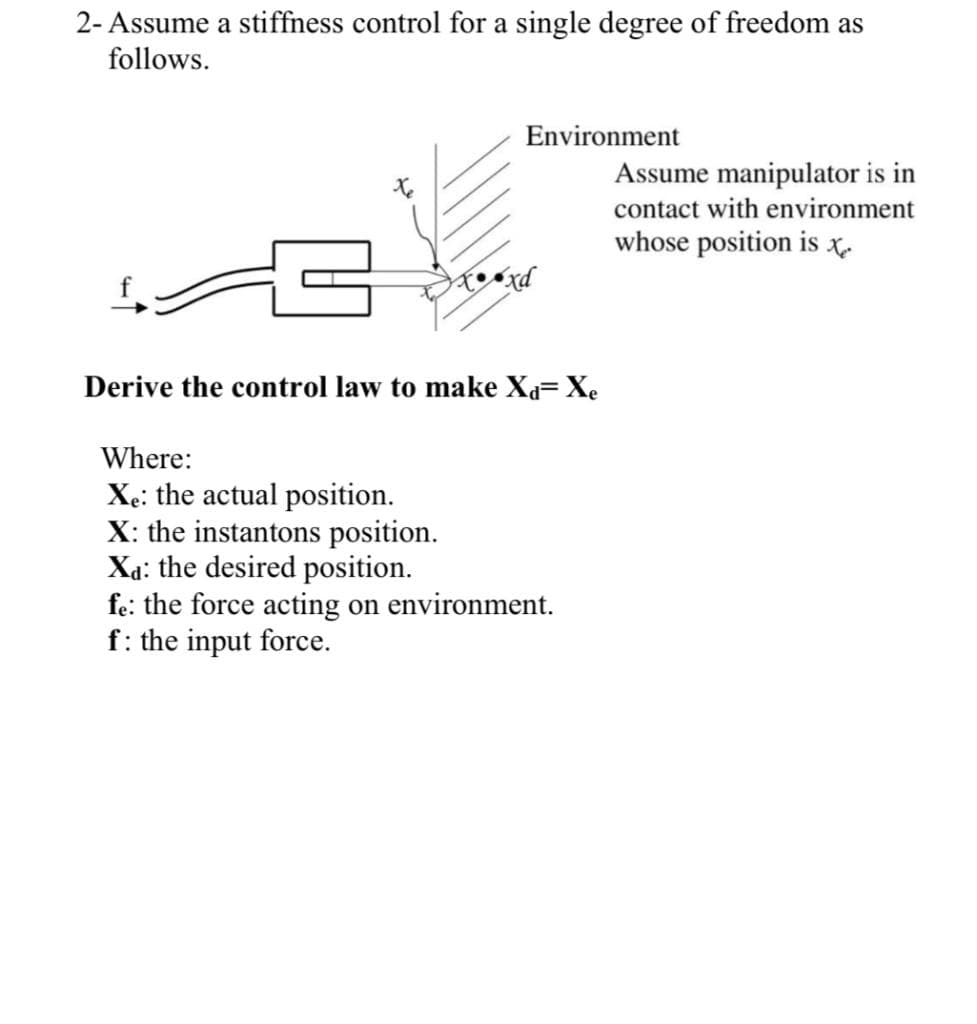
Transcribed Image Text:2- Assume a stiffness control for a single degree of freedom as
follows.
Environment
Assume manipulator is in
contact with environment
whose position is t
Derive the control law to make Xa= Xe
Where:
Xe: the actual position.
X: the instantons position.
Xa: the desired position.
fe: the force acting on environment.
f: the input force.
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

Step by step
Solved in 2 steps with 1 images

Knowledge Booster

![Digital Modulation Scheme (Amplitude-Shift Keying [ASK], Phase-Shift Keying [PSK], Frequency-Shift Keying [FSK])](/static/compass_v2/subjects/engineering/electrical-engineering.svg)
Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, electrical-engineering and related others by exploring similar questions and additional content below.Recommended textbooks for you