
Elements Of Electromagnetics
7th Edition
ISBN: 9780190698614
Author: Sadiku, Matthew N. O.
Publisher: Oxford University Press
expand_more
expand_more
format_list_bulleted
Related questions
Concept explainers
Question
Write the
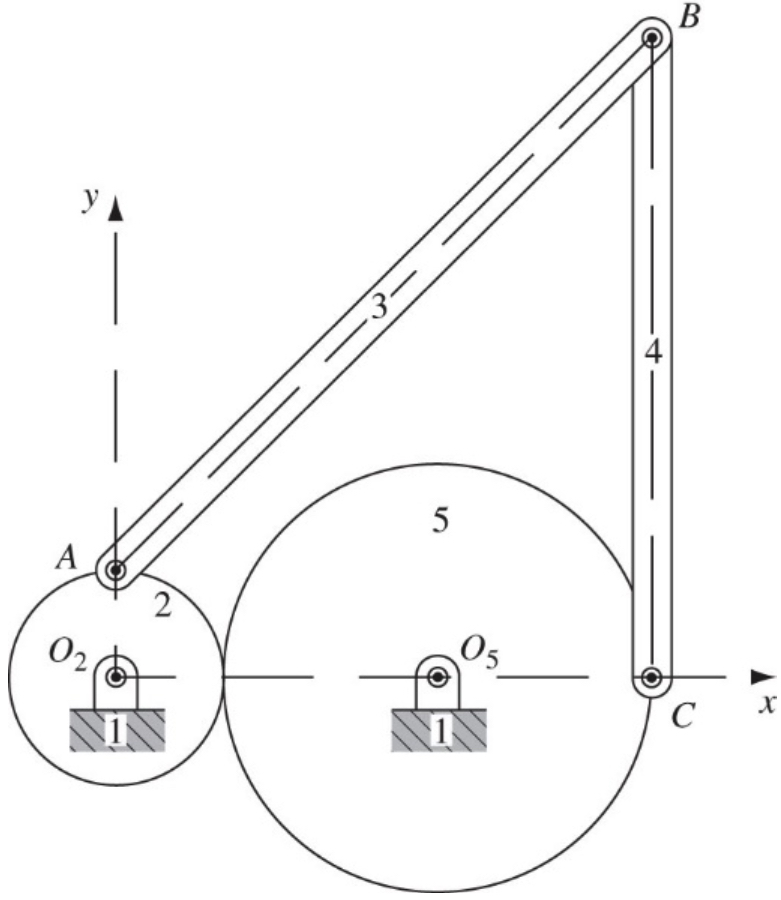

Transcribed Image Text:A
02
NIN
3.
5
1
05
B
C
X
Expert Solution
This question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.

This is a popular solution

Trending nowThis is a popular solution!

Step by stepSolved in 2 steps with 1 images

Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, mechanical-engineering and related others by exploring similar questions and additional content below.Similar questions
- Please don't provide handwritten solution ....arrow_forwardPlease don't provide handwritten solution.... Please I need to see the whole procedure. There are many similar problems but they calculate the velocity or acceleration, I need to calculate the positions, the time ratio and the stroke of link 6.arrow_forwardWrite trigonometric relations or circuit equations for the stepwise solution method. Obtain the velocity equations by taking the time derivatives of the position equations. Obtain the acceleration equations by taking the time derivatives of the velocity equations.arrow_forward
- herr solving pls very urgentarrow_forwardSeen in Figure 1, a small cart (with mass m and position x2) is riding inside a larger cart, which is massless, and has a position ₁. A spring and a damper in parallel connect the larger cart to the smaller cart, and another spring connects the exterior of the large massless cart to an input position, . For this problem, the diagram is similar to the one in Homework 2, Problem 1. It has the same equations of motion. You are not required to re-derive the equations of motion - please reference the solutions. Given this, Xu k im x1 k ww m x2 (tiven equation of motion: Ⓒ Small cart : m x2 + ((x₂-x₂)+ K(x₂-x) =Ô @lage corr: K (x₂-2x₁ + x ₁ ) + C (x₂-x) = 0 Figure 1: Schematic of the mechanical system to model in Problem 1. Your tasks: A. Find the state-space equations for the system in matrix form using ₁ and 2 and their derivatives. B. Represent the mechanical system in 2nd order matrix form using ₁ and 2 and their derivatives.arrow_forwardi need to solve part b pls quickk very urgent part (a) is solvedarrow_forward
- 1. The joints of an RR open chain robot manipulator are rotation around the X axis followed by rotation around the new Y axis, from proximal to distal end. Determine the rotation matrix from the base to the end effector if actuator 1 command is 60 degrees and actuator 2 command is -45 degrees.arrow_forwardSketch a planar linkage that has the ability to pick up a small ball and move it from one location to another using hinge joint. The sketch of the planar linkage should be able to operate in at least 3 degrees of freedom: rotation along pitch and yaw, and translation through the center of motion.arrow_forwardParrow_forward
- 4. A general fourbar linkage configuration and its notation are shown in the following figure and table. Find a 3, a 4,A¼, ABA, AB,Ap for open circuit by vector loop method. Row Link 1 Link 2 Link 3 Link 4 02 Rpa 63 6 2 7 9 30 10 6 30 - 12 - 15 7 3 8 85 25 3 10 6 8 45 -10 10 80 d 7 25 24 - 4 45 e 75 -50 10 300 Rp B A 03 2 X 04 NO O55arrow_forwardFind the transformation matrix for the following transformations: 1) Rotate 45° about Xo-axis. (Xo, Yo, Zo) → (X₁, Y₁, Z₁); 2) Followed by a rotation of 90° about Xo-axis. (X₁, Y₁, Z₁)→ (X₂, Y₂, Z₂); 3) Followed by a rotation of 60° about Y₂-axis. (X₂, X2, Z2)→ (X3, Y, Z3); 4) Followed by a rotation of 60° about Z₂-axis. (X3, Y3, Z3) → (X, Y4, Z4). Note: give final answer in matrix multiplication form, no need to write out the elements of the matrices or multiply the matrices out. URALLY AND AFICIALLY LGarrow_forwardFor the 3-DOF Industrial manipulator arm as shown in Figure 1, determine the joint displacements using inverse kinematics approach for known position and orientation of the end of the arm point. The link transformation matrices are given byarrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
- Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
 Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education  Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Elements Of Electromagnetics
Mechanical Engineering
ISBN:9780190698614
Author:Sadiku, Matthew N. O.
Publisher:Oxford University Press
Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:9780134319650
Author:Russell C. Hibbeler
Publisher:PEARSON
Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:9781259822674
Author:Yunus A. Cengel Dr., Michael A. Boles
Publisher:McGraw-Hill Education
Control Systems Engineering
Mechanical Engineering
ISBN:9781118170519
Author:Norman S. Nise
Publisher:WILEY
Mechanics of Materials (MindTap Course List)
Mechanical Engineering
ISBN:9781337093347
Author:Barry J. Goodno, James M. Gere
Publisher:Cengage Learning
Engineering Mechanics: Statics
Mechanical Engineering
ISBN:9781118807330
Author:James L. Meriam, L. G. Kraige, J. N. Bolton
Publisher:WILEY