
Concept explainers
Videos
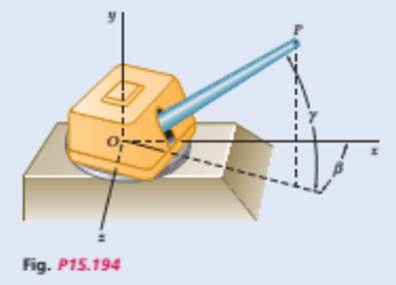
A gun barrel of length
(a)
The angular velocity of the barrel.
Answer to Problem 15.194P
The angular velocity of the barrel is
Explanation of Solution
Given Information:
The length of the gun barrel is
Write the expression for the angular velocity at the azimuth angle.
Here, the rate of increasing of azimuth angle is
Write the expression for the angular velocity at the elevation angle.
Here, the rate of increasing of elevation angle is
Write the expression for the angular velocity of the barrel.
Calculation:
Substitute
Substitute
Substitute
Conclusion:
The angular velocity of the barrel is
(b)
The angular acceleration of the barrel.
Answer to Problem 15.194P
The angular acceleration of the barrel is
Explanation of Solution
Write the expression for the angular acceleration of the barrel.
Calculation:
Substitute
Conclusion:
The angular acceleration of the barrel is
(c)
The velocity of point
The acceleration of point
Answer to Problem 15.194P
The velocity of point
The acceleration of point
Explanation of Solution
Write the expression for the velocity of point
Here, the position vector is
Write the expression for the position vector.
Here, the length of the barrel is
Write the expression for the acceleration of point
Calculation:
Substitute
Substitute
Substitute
Conclusion:
The velocity of point
The acceleration of point
Want to see more full solutions like this?
Chapter 15 Solutions
Package: Vector Mechanics For Engineers: Dynamics With 1 Semester Connect Access Card


- A painter is half way up a 10-m ladder when the bottom starts sliding out from under him. Knowing that point A has a velocity vA = 2 m/s directed to the left when 0= 60°, determine (a) the angular velocity of the ladder, (b) the velocity of the painter.arrow_forwardThe wheel W of radius R = 1.4 m rolls without slip on a horizontal surface.A bar AB of length L = 3.7 m is pin-connected to the center of the wheel and to a sliderA constrained to move along a vertical guide. Point C is the bar’s midpoint. Determinethe general relation expressing the acceleration of the slider A as a function of θ, L, R,the angular velocity of the wheel αW , and the angular acceleration of the wheel ωW .arrow_forwardKnowing that at the instant shown the angular velocity of rod AB is 15 rad/s clockwise, write down the equation of velocity of point B relative to point A. -V_Bi=(-15k)x(-0.2j) +V_Bj=V_Ai-(15k) x (0.6i+0.25j) -V_Bi=V_A+(-15k)x(0.2j) +V_Bj=V_Ai-(omega_BDk) x (-0.6i-0.25j)arrow_forward
- The mechanism shown is composed of rod GPV pin-connected to rod DPE at point P. Knowing that the velocity of V is 4 m/s downwards, A. [20%] Redraw bar GPV and determine its instantaneous center of rotation (label it as point C). Specify all angles and distances needed. B. [15%] Determine the angular velocity of rod GPV. C. [30%] Determine the velocity of point P. D. [20%] Redraw bar DPE and determine its instantaneous center of rotation (label it as point C). Specify all angles and distances needed. E. [15%] Determine the angular velocity of rod DPE. NOTE: Use INSTANTANEOUS CENTER METHOD for Velocity Analysisarrow_forwardA drum of radius r1 = 3 in. is mounted on a cylinder of radius r2 = 6 in. A cord is wound around the drum, and its extremity D is pulled to the left with a constant velocity of 6 in./s, causing the cylinder to roll without sliding. Determine: 1. The angular velocity of the cylinder. 2. The velocity of the center of the cylinder A. Select one: A. ω=6 rad/s; and VA = 30 in/s. B. ω=4 rad/s; and VA = 16 in/s. C. ω=5 rad/s; and VA = 25 in/s. D. ω=2 rad/s; and VA = 6 in/s.arrow_forwardThe system shown is composed of equal-length bars (L=0.20m). At the instant shown, the velocity of the midpoint of bar DC is 2m/s directed to the right. A. Identify the type of motion of each bar. B. Determine the angular velocities of each bar.arrow_forward
- The system shown is held at rest by the brake-and-drum system shown. After the brake is partially released at t= 0 it is observed that the cylinder moves 5 m in 4.5 s. Assuming uniformly accelerated motion, determine (a) the angular acceleration of the drum, (b) the angular velocity of the drum at t= 3.5 s.arrow_forwardA cylinder rolls without slipping between two moving plates C and D. The radius of the cylinder is r=4.0m. The velocity of the plate C is VC=6.0 m/s to the right. The velocity of the plate D is VD=2.0 m/s to the left. Using the instantaneous center of zero velocity (IC) to determine (3) The magnitude of the angular velocity of the cylinder ω=____________rad/sarrow_forwardIn the helicopter shown; a vertical tail propeller is used to pre- vent rotation of the cab as the speed of the main blades is changed. Assuming that the tail propeller is not operating determine the final angular velocity of the cab after the speed of the main blades has been changed from I80 to 240 rpm. (The speed of the main blades is measured relative to the cab, and the cab has a centroidal moment of inertia of 650 lb.ft.s2. Each of the four main blades is assumed to be a slender rod 14 ft weighing 55 lb.)arrow_forward
- The outer gear A rotates with an angular velocity of 6 rad/s counterclockwise. Knowing that the angular velocity of the intermediate gear B is 3 rad/s clockwise, determine: 1. The angular velocity of the arm ABC 2. The angular velocity of the outer gear C. Select one: A. ωarm=3 ω a r m = 3 rad/s (CW); and ωC=1.5 ω C = 1.5 rad/s (CW) B. ωarm=5 ω a r m = 5 rad/s (CW); and ωC=3 ω C = 3 rad/s (CW) C. ωarm=0 ω a r m = 0 rad/s ; and ωC=1.5 ω C = 1.5 rad/s (CCW) D. ωarm=1 ω a r m = 1 rad/s (CW); and ωC=0 ω C = 0 rad/sarrow_forwardA coin is tossed into the air. It is observed to spin at the rate of 600 rpm about an axis GC perpendicular to the coin and to precess about the vertical direction GD Knowing that GC forms an angle of 15° with GD, determine (a) the angle that the angular velocity w of the coin forms with G (b) the rate of precession of the coin about GD.arrow_forwardThe mechanism shown is composed of rod GPV pin-connected to rod DPE at point P. Knowing that the velocity of V is 4 m/s downwards, A. Redraw bar GPV and determine its instantaneous center of rotation (label it as point C). Specify all angles and distances needed. B. Determine the angular velocity of rod GPV. C. Determine the velocity of point P. D. Redraw bar DPE and determine its instantaneous center of rotation (label it as point C). Specify all angles and distances needed. E. Determine the angular velocity of rod DPE. Use IC method. Please don't show me the answer in chegg. I think there is an errorarrow_forward
 Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY