
Videos
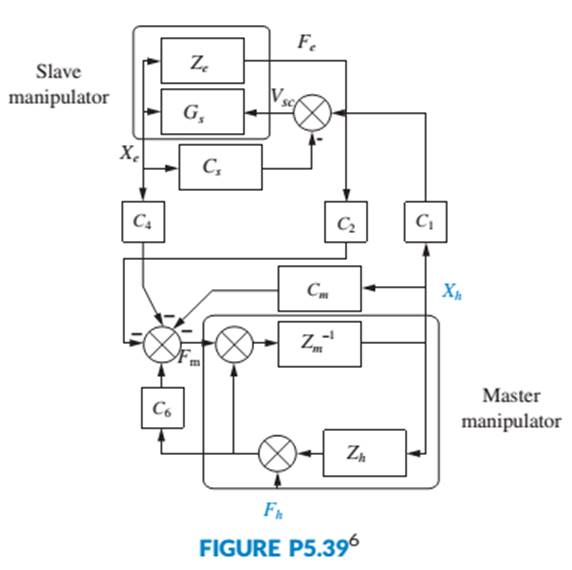
Some medical procedures require the insertion of a needle under a patient’s skin using CT scan monitoring guidance for precision. CT scans emit radiation, posing some cumulative risks for medical personnel. To avoid this problem, a remote control robot has been developed (Piccin, 2009). The robot controls the needle in position and angle in the constraint space of a CT scan machine and also provides the physician with force feedback commensurate with the insertion opposition encountered by the type of tissue in which the needle is inserted. The robot has other features that give the operator the similar sensations and maneuverability as if the needle was inserted directly. Figure P5.39 shows the block diagram of the force insertion
a. Assuming
b. Now with
Want to see the full answer?
Check out a sample textbook solution
Chapter 5 Solutions
Control Systems Engineering


- For the given close-loop system transfer function, determine its stability using Routh-Hurwitz Test for Stability.1. What is the stability of the system? (Stable, Unstable, Marginally Stable)arrow_forwardCan someone help me please and solve this question with steps and draw the block digram and find the transfer function of the system Thanksarrow_forwardexplain please. Which type(s) of systems will oscillate in response to a step function?arrow_forward
- Obtain the following requirements for a simple mass-spring-damper system with input of force f, output of displacement x, and translational motion only along the horizontal axis.a) Equation of motion,b) state space model,c) transfer function G(s),d) the time domain expression of the output according to the unit step function input,e) permanent regime error to be observed at the output according to the unit step function input,f) pole and zero positions in the complex plane,g) its absolute stability,h) the undamped natural frequency,i) damping ratio,j) damped natural frequency,k) open loop/static/dc gain,l) maximum overshoot (Mp),m) peak time (tp),n) settling time (ts, 2% tolerance).arrow_forwardCan you also please do the simulate the step response in MATLAB for the design and report achieved PO and settling time? Thank you.arrow_forwardFind the transfer function C(s)/R(s) by block-reduction technique.arrow_forward
- How would I plot the aircraft pitch angle response to elevator step inputs of -10, and +10 degrees for a duration of five seconds by implementing short period approximation using Simulink. What would the block diagram/ simulink layout roughly look like?arrow_forwardA heat exchanger system is depicted in the following figure and related system parameters are given at the table below. Suppose that the rate of heat energy gain for this system satisfies the simple material transport model; where, i represents the mass flow, T and I are the entering and leaving fluid temperature and cis specific heat capacity of fluid. Then, derive a frequency-domain model to calculate the temperature of Fluid-B leaving the heat exchanger. L K R₁, R Fluid-B→→→→→→ TAN 9 gained mc (Tx-TN) = Fluid-A TB BN TAX : Height of heat exchanger cylinder : Thermal conductivity of heat exchanger cylinder Radius of inner and outer tube : Thickness of inner and outer tube ri, ro A₁, A: Surface area of inner and outer tube C₁, C TAN, TAX → Fluid-A TR BX Fluid-B : Convective heat transfer coefficient of inner and outer tube Temperature of Fluid-A at entrance and exit TBN, TBX: Temperature of Fluid-B at entrance and exit C₁, C Heat capacity of Fluid-A and Fluid-Barrow_forwardA velocity of a vehicle is required to be controlled and maintained constant even if there are disturbances because of wind, or road surface variations. The forces that are applied on the vehicle are the engine force (u), damping/resistive force (b*v) that opposing the motion, and inertial force (m*a). A simplified model is shown in the free body diagram below. From the free body diagram, the ordinary differential equation of the vehicle is: m * dv(t)/ dt + bv(t) = u (t) Where: v (m/s) is the velocity of the vehicle, b [Ns/m] is the damping coefficient, m [kg] is the vehicle mass, u [N] is the engine force. Question: Assume that the vehicle initially starts from zero velocity and zero acceleration. Then, (Note that the velocity (v) is the output and the force (w) is the input to the system): 1. What is the order of this system?arrow_forward
- A velocity of a vehicle is required to be controlled and maintained constant even if there are disturbances because of wind, or road surface variations. The forces that are applied on the vehicle are the engine force (u), damping/resistive force (b*v) that opposing the motion, and inertial force (m*a). A simplified model is shown in the free body diagram below. From the free body diagram, the ordinary differential equation of the vehicle is: m * dv(t)/ dt + bv(t) = u (t) Where: v (m/s) is the velocity of the vehicle, b [Ns/m] is the damping coefficient, m [kg] is the vehicle mass, u [N] is the engine force. Question: Assume that the vehicle initially starts from zero velocity and zero acceleration. Then, (Note that the velocity (v) is the output and the force (w) is the input to the system): A. Use Laplace transform of the differential equation to determine the transfer function of the system.arrow_forwardThe transfer function of a system is the ratio between _________________ and ____________ in Laplace transform. a. Output and Input b. Input and Output c. Input and Feedback d. Output and Feedbackarrow_forwardQ1 A mechanical system with a rotating wheel of mass Mw (uniform mass distribution) is shown in Figure Q1. Springs and dampers are connected to wheel using a flexible cable without skip on wheel. (a) Determine all the mathematical modeling equations of the system for the translational and rotational motion. (b) Using the result in Q1(a), determine the translational motion equation in term of ? as a function of input motion ?. (c) By referring to standard second-order system form, determine the expressions for natural frequency and damping ratio of the system.arrow_forward
 Principles of Heat Transfer (Activate Learning wi...Mechanical EngineeringISBN:9781305387102Author:Kreith, Frank; Manglik, Raj M.Publisher:Cengage Learning
Principles of Heat Transfer (Activate Learning wi...Mechanical EngineeringISBN:9781305387102Author:Kreith, Frank; Manglik, Raj M.Publisher:Cengage Learning