Concept explainers
Videos
The modified model of the system shown in figure 1 for the gear pair attached between the motor shaft and the load. Also, compute the transfer functions
Answer to Problem 6.36P
The system’s modified model comprises the following equations as shown:
Also, the transfer functions are as follows:
Explanation of Solution
Given:
The speed control system for the field-controlled motor has been given as shown in figure 1:
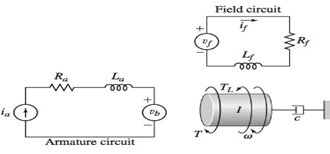
Figure 1
This speed-control system is equipped with a gear train of ratio N such that:
Concept Used:
- The system model equations for this speed-control system are as follows:
- The effective inertia and the effective damping for the rotational part equipped with a gear train of ratio N are as follows:
For field-circuit,
For rotational coupling,
Here, I and c are the effective inertia and effective damping of the system respectively.
Calculation:
The model equations for the system are:
For the inertia
Also, on considering the effect of gearbox in a rotational system, we get
Effective inertia,
Effective damping,
Thus, on using equations (2), (3) and (4), we have for effective inertia
Taking Laplace transform of equation (1) and (5) while keeping zero initial conditions, we have
From equations (6) and (7)
In case, for the multiple inputs system, for finding the transfer function for one system other inputs are temporarily set to zero that is,
For
Similarly, for
Conclusion:
The system’s modified model comprises the following equations as shown:
Also, the transfer functions are as follows:
Want to see more full solutions like this?
Chapter 6 Solutions
System Dynamics


 Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY