Concept explainers
Videos
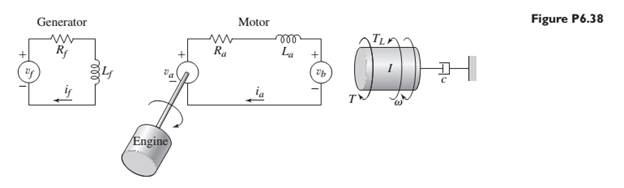
Figure P6.38 is the circuit diagram of a speed-control system in which the dc motor voltage
Derive the system model relating the output speed

Trending nowThis is a popular solution!

Chapter 6 Solutions
System Dynamics


- 1. Give an example of open loop and closed loop system (one example each). Also state the input, control system, feedback and output parameter. Example. 1. Open Loop - Water Heater: Input - Water Temperature (Cold) System - Heating Element Output - Water Temperature (Hot) 2. Closed Loop - Air-conditioning System Input - Desired Room Temperature Control - Motor controller/Compressor/ACU Feedback - Temperature Sensing Output - Room Temperaturearrow_forward1.block diagram physical meaning and the time response for different inputsarrow_forwardTIME DOMAIN MODELING AND RESPONSE FOR CONTROL SYSTEMSarrow_forward
- Suppose a spring with spring constant 7 N/m is horizontal and has one end attached to a wall and the other end attached to a 2 kg mass. Suppose that the friction of the mass with the floor (i.e., the damping constant) is 1 N⋅s/m a) Set up a differential equation that describes this system. Let x to denote the displacement, in meters, of the mass from its equilibrium position, and give your answer in terms of x,x′,x′′. Assume that positive displacement means the mass is farther from the wall than when the system is at equilibrium. b) Find the general solution to your differential equation from the previous part. Use c1 and c2 to denote arbitrary constants. Use t for independent variable to represent the time elapsed in seconds. Your answer should be an equation of the form x=… c) Enter a value for the damping constant that would make the system critically damped. ?Ns/marrow_forwardConsider a cruise control system shown in Figure 1. Where f is the engine force, v is the velocity, fb is the friction force, and fb = bv. Requirements: Assuming M = 2000 kg, b = 80Nsec/m, and f = 600 N: Find the transfer function of the system.arrow_forwardA vibrating spring-mass system has the feedback control system shown in Fig Q3 below. (figure attached as image ACT)If K = 12.25 determine:6.1 the transfer function ; (3)6.2 the characteristic equation with a impulse input; (1)6.3 the un-damped natural frequency of the system; (2)6.4 the damping ratio; (2)6.5 the damped natural frequency; (2)6.6 the maximum percentage overshoot; (2)6.7 the peak time; (1)6.8 the settling time for the response within 2%. (2)arrow_forward
- For the systems illustrated below, find the natural frequencies, mode shapes and general responses for a block that slides on a cart. Neglect all frictions in contact.arrow_forwardThe motion of a pointer over a scale is resisted by a viscous damping torque of magnitude 4 N-m at an angular velocity of 2 rad / s. The pointer, of negligible inertia, is mounted on the end of a relatively flexible shaft of stiffness 2 N-m / rad, and this shaft is driven through a 1 to 4 reduction gear box Determine the overall transfer function of the system If the input shaft to the gear box is suddenly rotated through 1 completed revolution, determine the time taken by the pointer to reach a position within 1 percent of its final valuearrow_forwardA stock-flow system models the level of water in a lake. Near a certain equilibrium point, there are three feedback loops: an amplifying feedback loop with strength of +0.55 per month, a stabilizing feedback loop with strength of -0.09 per month, and an amplifying feedback loop with strength of +0.79 per month. Calculate the strength of the overall feedback.arrow_forward
- 7-Describe the distinction between an underdamped, overdamped, severely damped, and force-driven systems. 8- What is the Hamilton's principle, and what derivations have we employed as a result of it?arrow_forwardApplication on first-order ODEarrow_forwardIn the pulley system shown in Figure P3.22, assume that the cable is massless and inextensible, and assume that the pulley masses are negligible. The force f is a known function of time. Obtain the expression for the natural frequency.arrow_forward
 Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY