
Concept explainers
Videos
(a)
The transfer function
Answer to Problem 6.47P
The transfer function
Explanation of Solution
Given:
- The electrical and
mechanical sub-system of the speaker system is shown in figure below: - Characteristic equation is the denominator of the transfer function of the corresponding system. Thus, a transfer function for a system could be represented as follows:
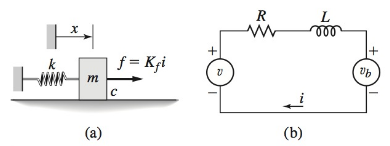
Also, the inductance (L) and damping constant (c) are zero.
Concept Used:
The model equations for the speaker system as shown in the figure are:
For mechanical sub-system:
For electrical sub-system:
Calculation:
Since for the speaker system, we have
On using equations (1) and (2), while keeping initial conditions equal to zero such that
Similarly,
Thus, at
Therefore, the characteristic equation of this transfer function is as:
On taking out characteristic roots that are,
Conclusion:
The transfer function
And the characteristic roots are as follows:
(b)
The third order transfer function and the corresponding characteristic roots of the speaker system for the given parameter values. Also, to compare this result with the one obtained in sub-part (a).
Answer to Problem 6.47P
The transfer function and characteristic roots for third order case of speaker system are:
Similarly, for the second order case of the speaker system, the transfer function and characteristic roots are:
On comparing these cases, it is concluded that system is stable in both the cases as roots are lying left to the imaginary axis in s-plane. However, the complex roots in the second order case are far into imaginary axis in comparison to the complex roots in third order case of the speaker system.
Explanation of Solution
Given:
Here, the parameter values for the speaker system are as follows:
Concept Used:
- Here, the transfer function
- Characteristic equation is the denominator of the transfer function of the corresponding system. Thus, a transfer function for a system could be represented as follows:
Also, at
Calculation:
Since for the speaker system, the transfer function is as follows:
On substituting the parameter values in the above expression, we get
Therefore, the characteristic equation would be:
On taking out characteristic roots that are,
Similarly, for the transfer function at
On keeping the parameter values in this expression, we have
Therefore, the characteristic equation would be:
On taking out characteristic roots that are,
Conclusion:
The transfer function and characteristic roots for third order case of speaker system are:
Similarly, for the second order case of the speaker system, the transfer function and characteristic roots are:
On comparing these cases, it is concluded that a system is stable in both the cases as roots are lying left to the imaginary axis in s-plane. However, the complex roots in the second order case are far into imaginary axis in comparison to the complex roots in third order case of the speaker system.
Want to see more full solutions like this?
Chapter 6 Solutions
SYSTEM DYNAMICS LL+CONNECT


 Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY