
Concept explainers
Videos
A point at a 6.5-in radius is on a body that is in pure rotation with
- Write an expression for the particle's acceleration vector in position
- Write an expression for the particle's acceleration vector in position
- Write a vector equation for the acceleration difference between points
vectors in this equation and solve for the acceleration difference numerically. - Check the result of part c with a graphical method.
(a)
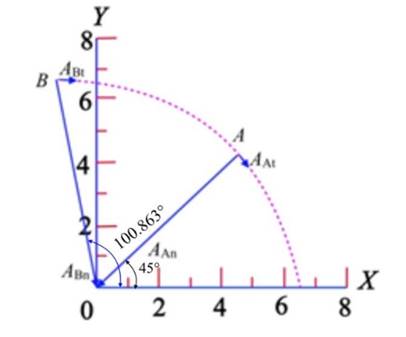
An expression for the particle’s acceleration vector in position A.
Answer to Problem 7.1P
Acceleration in polar form is
Acceleration in cartesian form is
Explanation of Solution
Calculation:
Compute the angular velocity at point B.
Here,
Substitute
Calculate the angular position at point B.
Here,
Substitute
Compute the magnitude of the normal component of acceleration at point A.
Here,
Compute the direction of the normal component of acceleration at point A.
Compute the magnitude of the tangential component of acceleration at point A.
Here,
Compute the direction of the tangential component of acceleration at point A.
Compute the magnitude of the normal component of acceleration at point B.
Here,
Compute the direction of the normal component of acceleration at point B.
Compute the magnitude of the tangential component of acceleration at point B.
Here,
Compute the direction of the tangential component of acceleration at point A.
Draw the position vector diagram.
Computer polar form by using the formula.
Calculate the velocity at point A.
Compute the acceleration vector in position A by the following formula.
Compute the acceleration vector of position A in cartesian form.
Therefore, the acceleration of point A is
(b)
An expression for the particle’s acceleration vector in position B.
Answer to Problem 7.1P
Acceleration in polar form is
Acceleration in cartesian form is
Explanation of Solution
Calculation:
Compute the angular velocity at point B.
Here,
Substitute
Calculate the angular position at point B.
Here,
Substitute
Compute the magnitude of the normal component of acceleration at point A.
Here,
Compute the direction of the normal component of acceleration at point A.
Compute the magnitude of the tangential component of acceleration at point A.
Here,
Compute the direction of the tangential component of acceleration at point A.
Compute the magnitude of the normal component of acceleration at point B.
Here,
Compute the direction of the normal component of acceleration at point B.
Compute the magnitude of the tangential component of acceleration at point B.
Here,
Compute the direction of the tangential component of acceleration at point A.
Draw the position vector diagram.
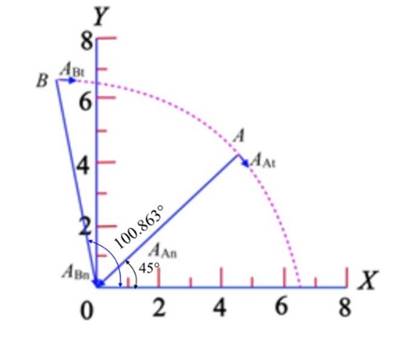
Compute the position vector of point B.
Compute the polar form.
Compute the acceleration vector in position B by the following formula.
Compute the acceleration vector of position B in cartesian form.
(c)
A vector equation for the acceleration difference between points B and A.
Explanation of Solution
Calculation
Calculate the difference in acceleration between the given points.
Therefore, the position difference is
(d)
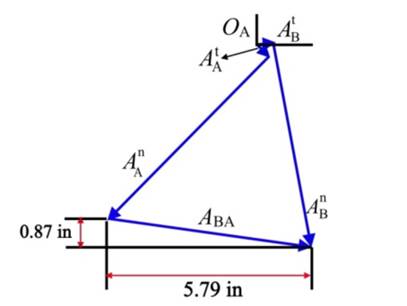
The answer from the graphical method.
Explanation of Solution
Calculation Solve the equation
Construct the acceleration polygon following the below steps.
- Locate point OA.
- Draw 0.325 in line from the point OA. This represents the velocity of the point
- From the tip of the above line, draw a line of 6.508 in. This represents the acceleration of the point
- From the point OA, draw a 0.325 line which represents the velocity of the point
- From the tip of the point
- From the tip of point
Want to see more full solutions like this?
Chapter 7 Solutions
DESIGN OF MACHINERY (LL W/ CONNECT)


- A disk rotates around an axis through its center that is perpendicular to the plane of the disk. The disk has a line drawn on it that extends from the axis of the disk to the rim. At t = 0 this line lies along the x-axis and the disk is rotating with positive angular velocity v0z. The disk has constant positive angular acceleration az. At what time after t = 0 has the line on the disk rotated through an angle θ?arrow_forwardI have attached a picture of the lengths of the robot's links, the axes of rotation for each joint, and the offsets between consecutive joints. Based on these coordinates: m = metersx = 0.399 m y = -0.12 m z = 0.047 m theta x = 11.6 theta y = -0.12 theta z = 82.5 Please calculate the DH parameter table.arrow_forwardA load is raised 11 ft by the gears and wheel system below. Gear A is initially rotating at rest and accelerates uniformly to omega = 24 rpm in t= 10 sec and maintain then maintain this constant 24 rpm speed. The dimensions are rA= 1 in, rB= 9 in and rC=16 in. 2) After 10 sec, find the distance s2 in feet and in NC es needed to reach the 11 ft, find thetaC2(t), alphaA2, alphaB2 in rad/s^2, omegaA2(t), omegaB2(t) in rad/s, thetaA2(t), in rad and the distance s2 in ft that should be made to get to the 11 ft raising distance of the load. 3) Deduce the number of revolutions made by gear A and how long it will take, to raise the load up to 11 ft.arrow_forward
- A 2.5 ft diameter flywheel of a gas engine has a pulley 10 in. in diameter bolted to it (both turning together). The flywheel turns at a speed of 150 rpm. Find a. the angular speed of the pulley in radians per second b. the linear speed in feet per minute of a point on the surface of the flywheel c. the linear speed in feet per minute of a belt running on the pulley, assuming no slipping between the belt and pulley surface.arrow_forwardTwo cylinders rolling in the opposite direction has a speed ratio of 3. If the diameter of driver is 10 inches, find the center distance between cylinders. A. 15 in B. 10 in C. 25 in. D. 20 in. Please solve the Problem elaborately. Your solution will be use as reference for my studies. Thank you so much your work will be appreciated much!arrow_forwardThe kinematic diagram of the arm slide mechanism, shown below, is oriented at 12 = 600 with an angular limb and 12 = 50 ??? / ? as the speed of the mechanism. Please do the following about the order. a- Write the Vector Closure Equation and bring it into scalar form. b- Make a position analysis and find S13, ?14. c- Find 13, ?̇14 ‘by analyzing velocity.arrow_forward
- A load is raised 11 ft by the gears and wheel system below. Gear A is initially rotating at rest and accelerates uniformly to omega = 24 rpm in t= 10 sec and maintain then maintain this constant 24 rpm speed. The dimensions are rA= 1 in, rB= 9 in and rC=16 in. 1) From 0 to 10 sec, find alphaA1, alphaC1 in rad/s^2, omegaA1(t), omegaC1(t) in rad/s, thetaA1(t), thetaB1(t) and thetaC1(t) in rad, and the distance made by the load s1 in inches and in feet made by the load during this time. 2) After 10 sec, find the distance s2 in feet and in NC es needed to reach the 11 ft, find thetaC2(t), alphaA2, alphaB2 in rad/s^2, omegaA2(t), omegaB2(t) in rad/s, thetaA2(t), in rad and the distance s2 in ft that should be made to get to the 11 ft raising distance of the load. 3) Deduce the number of revolutions made by gear A and how long it will take, to raise the load up to 11 ft. In the box below, give the time it takes to raise the load in seconds, with one decimal.arrow_forwardThe crank rod (OB) in the crank-piston mechanism shown in the figure is rotating with CONSTANT n rpm (revolutions per minute) in CCW (counter clockwise). The length of the rods are r and L. The length of the piston is 10 cm. Find the components of the tangential (not angular) velocity and tangential (not angular) acceleration vectors (Vx, ax, Vy, ay) of the MIDPOINT (not anyone of the ENDPOINTS) the piston rod (BA) at the given instant by the angle teta. n=324 rpm r=18.7 cm L=46.75 cm teta=85arrow_forwardLinear displacement diagram corresponding to: 1.Accelerated velocity 2.Zero velocity 3.Decelerated velocity 4.Uniform velocity 5.Nonearrow_forward
- In the kinematic diagram, the limb dimensions are given below, in the arm slide mechanism, the actuating limb angular position is (theta)θ12 = 600 and the speed of the mechanism is given as (thetadot)θ'12 = 50 rad / s . Do the following operations respectively. Find S'13, (thetawithdot)θ'14 by analyzing velocity.arrow_forward5. Explain the following motion for Planar Kinematics of Rigid Bodies a) Translation b) Rotation c) General Motionarrow_forwardA 3 in radius disk spins at the constant ω1 - 5 radian/s and a constant rate ω2= 4 radians/s. If the angle is 45 degrees, find the absolute acceleration at point P.arrow_forward
 Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY