
Control Systems Engineering
7th Edition
ISBN: 9781118170519
Author: Norman S. Nise
Publisher: WILEY
expand_more
expand_more
format_list_bulleted
Videos
Textbook Question
Chapter 12, Problem 17P
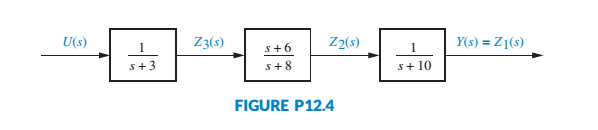
The open-loop system of Problem 14 is represented as shown in Figure P12.4. If the output of each block is assigned to be a state variable, design the controller gains for feedback from these state variables. [Section: 12.4]
Expert Solution & Answer
Want to see the full answer?
Check out a sample textbook solution
Students have asked these similar questions
1. Give an example of open loop and closed loop system (one example each). Also state the input, control system, feedback and output parameter.
Example.
1. Open Loop - Water Heater:
Input - Water Temperature (Cold)
System - Heating Element
Output - Water Temperature (Hot)
2. Closed Loop - Air-conditioning System
Input - Desired Room Temperature
Control - Motor controller/Compressor/ACU
Feedback - Temperature Sensing
Output - Room Temperature
9
Reduce the following block-diagram into one block. (Describe the control system with one
transfer function and write it.) *
W2
W1
W3
The
Gilles & Retzbach model of a distillation column, the system model includes the dynamics of a boiler, is driven by the inputs of steam flow and
the flow rate of the vapour side stream, and the measurements are the temperature changes at two different locations along the column. The state
space model is given by:
x =
0 00
-30.3
0.00012 -6.02 0 0
0 -3.77 00
0
-2.80 0 0
Is the system?:
a. unstable
b.
C.
not unstable
x+
6.15
0
0
0
0
3.04
0 0.052
not asymptotically stable
d. asymptotically stable
-1
u y =
0
0
0
0
-7.3
0
0
-25.0
X
Chapter 12 Solutions
Control Systems Engineering
Ch. 12 - Prob. 1RQCh. 12 - Prob. 2RQCh. 12 - 3. Different signal-flow graphs can represent the...Ch. 12 - Prob. 4RQCh. 12 - Under what conditions can inspection of the...Ch. 12 - In order to determine controllability...Ch. 12 - Prob. 7RQCh. 12 - Prob. 8RQCh. 12 - Prob. 9RQCh. 12 - Prob. 10RQ
Ch. 12 - Prob. 11RQCh. 12 - Prob. 12RQCh. 12 - Prob. 13RQCh. 12 - Prob. 14RQCh. 12 - 15. In order to effect a complete observer design,...Ch. 12 - Under what conditions can inspection of the...Ch. 12 - 17. In order to determine observability...Ch. 12 - Prob. 1PCh. 12 - Prob. 2PCh. 12 - 3. The following open-loop transfer functions can...Ch. 12 - Prob. 4PCh. 12 - Prob. 5PCh. 12 - Prob. 6PCh. 12 - Prob. 7PCh. 12 - Prob. 8PCh. 12 - Prob. 9PCh. 12 - Prob. 10PCh. 12 - Prob. 11PCh. 12 - Prob. 12PCh. 12 - Prob. 13PCh. 12 - Prob. 14PCh. 12 - Prob. 15PCh. 12 - Repeat Problem 14 assuming that the plant is...Ch. 12 - The open-loop system of Problem 14 is represented...Ch. 12 - Prob. 18PCh. 12 - Prob. 20PCh. 12 - Prob. 21PCh. 12 - Prob. 22PCh. 12 - Prob. 23PCh. 12 - Prob. 24PCh. 12 - Prob. 26PCh. 12 - Prob. 27PCh. 12 - Prob. 29PCh. 12 - Prob. 30PCh. 12 - Prob. 31PCh. 12 - Prob. 32PCh. 12 - Prob. 33PCh. 12 - Prob. 41PCh. 12 - Prob. 42PCh. 12 - Prob. 44P
Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, mechanical-engineering and related others by exploring similar questions and additional content below.Similar questions
- For the system represented by the following block diagram, Find a) The Closed-loop Transfer function. b) Characteristic equation. c) Type and Order of the system. c) Time-domain Specifications ( Delay Time, Peak Time, Rise Time, Settling time, and Percentage overshoot). R(s) C(s) G(s) H(s) Where G(s) and H(s) are given as : 324 G(s) = s(s+6) H(S) : 1arrow_forwardThe open loop transfer function of a humanoid's arm control system is given as: K G(s) = 2 s(s + 2s + 2) (a) Clearly locate all poles and zeros on a linear graph paper. Provide calculations for the following: asymptote angles, centroid for asymptotes, and departure angle from complex pole. (b) Plot the complete root locus, with the locus on the real axis is clearly shown. Use the scale of 4 cm : 1 unit for both axes and choose the longer side of the graph paper as the real axis.arrow_forwardroot locus electrical engineering Don't overthink and reject. Complete the solution as per the given transfer function. No need of quadratic equation just simplify for the exact given transfer function.arrow_forward
- 11. Consider a system that can be modeled as shown. The input x in (t) is a prescribed motion at the right end of spring k 2. Find X(s) the system transfer function Xeq(s)* m k₂ ww Xin The values of the parameters are m= 30 kg, k ₁=700 N/m, k 2= 1300 N/m, and b=200 N- s/m. Write a MATLAB script file that: (a) calculates the natural frequency, damping ratio, and damped natural frequency for the system; and (b) uses the impulse command to find and plot the response of the system to a unit impulse input.arrow_forwardObtain the state space model of the system shown below. Use equations for control theory state space modeling.arrow_forward3- Nise (4.4) A unity feedback control system has the following open-loop transfer function: G(s) = 45+¹ Find expressions for 4s+1 45² its time response when is subjected to unit impulse input.arrow_forward
- Given a state space model [1 1 + 0 u -1 -2 y = [1 1 0] with input u and output y. a). Derive the transfer function representation. b). Derive the differential equations representation. c). Compute the response y(t) with step control input u(t) = 1(t) and zero initial condition. d). and initial condition r(0) = [11 0]". Compute the state response r(t) with control input u(t) = 1(t)arrow_forwardQuestion 5: A model for a single joint of a robotic manipulator is shown in Figure below. The usual notation is used. The gear inertia is neglected and the gear reduction ratio is taken as 1:r (Note: r < 1). a) Draw a linear graph for the model, assuming that no external (load) torque is present at the robot arm. b) Using the linear graph derive a state model for this system. The input is the motor magnetic torque Tm and the output is the angular speed o, of the robot arm. What is the order of the system? Jm m (viscous) 1:r Motor Robot Arm Gear Box (Light)arrow_forwardFor the system with open loop transfer function given by R(s) K s(s + 1) (s² + 4s +13) where K is the feedback gain. Sketch the root locus a) How many asymptotes are there for this system's root locus? what are asymptote angles? What is the center of asymptotes? C(s) b) Does the root locus cross the imaginary axis? where and what is the value of K at that point? c) Is there any break away, break in points? What is the approximate values of these points?arrow_forward
- Problem 3. Find the transfer function C(s)/R(s) for the following block diagram using block diagram reduction: R(S) Gso G200 G G3()arrow_forwarda)is the aircraft stable about the equilibrium represented by the transfer function? b) Using proportional feedback,what is the range of acceptable gains for the closed loop systen to be stable? c) Design a feedback control system that allows the pilot to command a pitch angle with overshoot less than or equal to 4.15% and a natural frequency of greater than or equal to 0.99 rad/s d) Design a feedback control system that allows the pilot to command a pitch angle with the same overshoot and a natural frequency of one half the system in part c.arrow_forward11. A system is described by the following differential equation: [Section 2.3] d'x dx +2 + 3x = 1 dt with the initial conditions x(0) = 1, ¿(0) = -1. Show a block diagram of the system, giving its transfer function and all pertinent inputs and out- puts. (Hint: the initial conditions will show up as added inputs to an effective system with zero initial conditions.)arrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
 Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Elements Of Electromagnetics
Mechanical Engineering
ISBN:9780190698614
Author:Sadiku, Matthew N. O.
Publisher:Oxford University Press
Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:9780134319650
Author:Russell C. Hibbeler
Publisher:PEARSON
Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:9781259822674
Author:Yunus A. Cengel Dr., Michael A. Boles
Publisher:McGraw-Hill Education
Control Systems Engineering
Mechanical Engineering
ISBN:9781118170519
Author:Norman S. Nise
Publisher:WILEY
Mechanics of Materials (MindTap Course List)
Mechanical Engineering
ISBN:9781337093347
Author:Barry J. Goodno, James M. Gere
Publisher:Cengage Learning
Engineering Mechanics: Statics
Mechanical Engineering
ISBN:9781118807330
Author:James L. Meriam, L. G. Kraige, J. N. Bolton
Publisher:WILEY
Ficks First and Second Law for diffusion (mass transport); Author: Taylor Sparks;https://www.youtube.com/watch?v=c3KMpkmZWyo;License: Standard Youtube License