Concept explainers
Videos
Expression for vehicle’s speed as a function of time (
Answer to Problem 3.29P
The vehicle’s speed as a function of time,
Explanation of Solution
Given:
Weight of a rear wheel = 500 lb.
Weight of front wheel = 800 lb.
Weight of the body = 9000 lb.
Radius of rear wheel = 4ft.
Radius of front wheel = 2ft.
Concept used:
The object in question can translate in two dimensions and can rotate only about an axis that is perpendicular to the plane.
Object in question is a rigid body that moves in a plane passing through its mass center.
The motion of this object is defined by its translational motion in the plane and its rotational motion about an axis perpendicular to the plane. Two force equations describe the translational motion, and a moment equation is needed to describe the rotational motion.
The two force equations of the translational motion:
Using Newton’s laws for plane motion,
Where,
For an objects’ planar motion which rotates only about an axis perpendicular to the plane, the equation of motion can be written down using Newton’s Second Law.
Equation of Motion:
Where
Here the rotation is about the mass center, G, and the angular acceleration is taken as
Where
Derivation of Equation of motion:
Taking the body and the wheels as separate systems with axle,
Free body diagram of the body of the road roller:
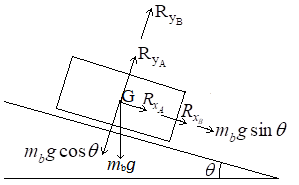
Force equations of the translational motion of body:
In the x -direction,
The acceleration,
In the y -direction,
The acceleration,
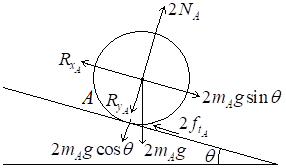
Free body diagram of the front wheel:
Sum of force in x -direction:
Sum of force in y -direction:
The acceleration,
Moments equation:
Where,
Assuming the wheels are rolling without slipping,
Modelling the wheels as a cylinder of radius
Substituting
Substitute
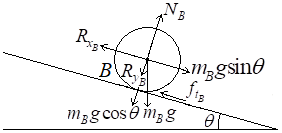
Free body diagram of the rear wheels:
Sum of force in x -direction:
Sum of force in y -direction:
The acceleration,
Moments equation:
Where,
Assuming the wheels are rolling without slipping,
Modelling the wheels as a cylinder of radius
Substituting
Substitute
Substitute
Substitute the given values to equation
Conclusion:
The vehicle’s speed as a function of time,
Want to see more full solutions like this?
Chapter 3 Solutions
System Dynamics


 Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY