Artificial Intelligence: A Modern Approach
3rd Edition
ISBN: 9780136042594
Author: Stuart Russell, Peter Norvig
Publisher: Prentice Hall
expand_more
expand_more
format_list_bulleted
Concept explainers
Question
Chapter 4, Problem 13E
Program Plan Intro
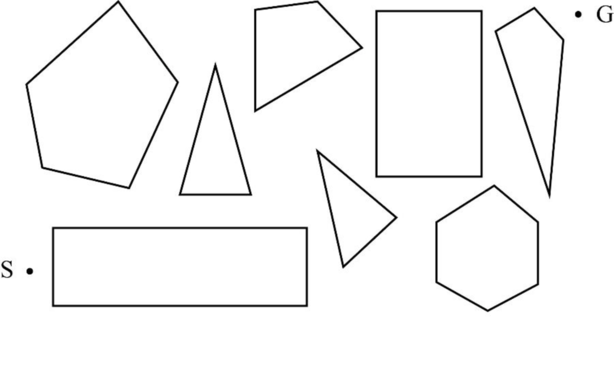
Figure 3.31
Hill climbing is effective at finding reasonable if not optimal paths for very little computational cost, and seldom fails in two dimensions.
Explanation of Solution
b.
With non-convex obstacles, getting stuck is much more likely to be a problem. It is shown in below figure...
Explanation of Solution
c.
Notice that this is just depth-limited search, wh...
Explanation of Solution
d.
Set the “k” to maximum...
Explanation of Solution
e.
The LTRA* always take a move. If the previous state better than new state, it makes a move back...
Expert Solution & Answer
Want to see the full answer?
Check out a sample textbook solution
Students have asked these similar questions
Suppose that you have a maze search problem. From each numbered square in the maze, youmay move that exact number of squares horizontally or vertically in a straight line. Startingat a particular square (e.g. the top-left corner), find a path to the goal square marked "G".3 4 1 3 1 3 3 3 G 2 3 1 2 2 3 4 2 3 3 3 4 1 4 3 2
Describe the State Space components of this problem. Then solve the problem using breadthirst search and the depth first search. Hint: Indicate the changes to the Open and ClosedQueues in solving this problem for each type of search.
Consider the vacuum-world problem defined as shown in the following figure.
a. Which of the algorithms defined in this chapter would be appropriate for this problem? Should the algorithm use tree search or graph search?
b. Apply your chosen algorithm to compute an optimal sequence of actions for a 3×3 world whose initial state has dirt in the three top squares and the agent in the center.
c. Will you prefer an agent with state/ memory in this scenario?
d. Compare your best search agent with a simple randomized reflex agent that sucks if there is dirt and otherwise moves randomly.
e. Consider what would happen if the world were enlarged to n × n. How does the performance of the search agent and of the reflex agent vary with n?
Assume we have a robot in the Vacuum-world Problem which described in our lectures. If weextend the environment of this problem to be three squares instead of two squares (described in thisfigure), generate the State Space Graph of this game and compare its complexity with its smallversion (2-squares environment)
Chapter 4 Solutions
Artificial Intelligence: A Modern Approach
Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, computer-science and related others by exploring similar questions and additional content below.Similar questions
- SUBJECT: ARTIFICIAL INTELLIGENCE Write and implement the best first search algorithm where we have given the Start state and Goal state and we want to reach the goal state. 4 7 3 1 8 2 5 6 Initial state 1 2 3 8 4 7 6 5 Goal statearrow_forwardAn agent is trying to eat all the food in a maze that contains obstacles, but he now has the help of his friends! An agent cannot occupy a squarethat has an obstacle. There are initially k pieces of food (represented by dots), at positions (f1,...,fk). Thereare also n agents at positions (p1,...,pn). Initially, all agents start at random locations in the maze. Consider a search problem in which all agents move simultaneously;that is, in each step each agent moves into some adjacent position (N, S, E, or W, or STOP). Note that any number of agents may occupy the same position. Figure 1: A maze with 3 agents Give a search formulation to the problem of looking for both gold and diamondin a maze (wirte step with detail)? Knowing that you have M squares in the maze that do not have an What is the maximum size of the state space.arrow_forwardPlease don't use handwritting for this question How would you modify the dynamic programming algorithm for the coin collecting problem if some cells on the board are inaccessible for the robot? Apply your algorithm to the board below, where the inaccessible cells are shown by X’s. How many optimal paths are there for this board? You need to provide 1) a modified recurrence relation, 2) a pseudo code description of the algorithm, and 3) a table that stores solutions to the subproblems.arrow_forward
- Consider the navigation problem shown in Figure 1. The number next to each edge is the cost of the performing the action corresponding to that edge. You start from A and your goal is to get to F. List the order in which nodes are expanded, which nodes are added to the fringe and which states are added to the closed set when performing Graph Search using: breadth-first search. depth-first search. iterative deepening search. uniform cost searcharrow_forwardagents: An agent is trying to eat all the food in a maze that contains obstacles, but he now has the help of his friends! An agent cannot occupy a square that has an obstacle. There are initially k pieces of food (represented by dots), at positions (f1,...,fk). There are also n agents at positions (p1,...,pn). Initially, all agents start at random locations in the maze. Consider a search problem in which all agents move simultaneously ;that is, in each step each agent moves into some adjacent position (N, S, E, or W, or STOP). Note that any number of agents may occupy the same position. Figure 1: A maze with 3 agents For each of the following heuristics, indicate (yes/no) whether or not it is h1: The number of dots (representing food) remaining. [ True, False ]. h2(s)=0, where s is a state node. [ True, False ]. h3(s)=1, where s is a state node. [ True, False ].arrow_forwardagents: An agent is trying to eat all the food in a maze that contains obstacles, but he now has the help of his friends! An agent cannot occupy a square that has an obstacle. There are initially k pieces of food (represented by dots), at positions (f1,...,fk). There are also n agents at positions (p1,...,pn). Initially, all agents start at random locations in the maze. Consider a search problem in which all agents move simultaneously ;that is, in each step each agent moves into some adjacent position (N, S, E, or W, or STOP). Note that any number of agents may occupy the same position. Give a search formulation to the problem of looking for both gold and diamond in a Knowing that you have M squares in the maze that do not have an What is the maximum size of the state space. What is the maximum branching For each of the following heuristics, indicate (yes/no) whether or not it is h1: The number of dots (representing food) remaining. [ True, False ]. h2(s)=0, where s is a…arrow_forward
- the closest-pair problem can be posted in the 3-dimensional space, in which the euclidean distance between two points p1(x1, y1, z1) and p2(x2, y2, z2) is defined as d = √(x1−x2)^2+(y1−y2)^2+(z1−z2)^2 what is the time-efficiency class of the brute-force algorithm for the 3-dimensional closest-pair problem?arrow_forward. The vacuum cleaner problem is a well-known search problem for a vacuum cleaner robot that works on Artificial Intelligence. In this problem to clean up the whole area. In the superficial world, the vacuum cleaner agent has a location sensor and a dirt sensor to know where it is (room A, room B, or any n room) and whether the room is dirty. Also, the robot needs to avoid the obstacle (stool) and find a new path. A possible performance measure is to maximize the number of clean rooms over a certain period. For this problem, four main conditions should be considered: in(x,y) means a robot at (x,y) dirt(x,y) means there is a dirt at(x,y) facing(d) means the robot is facing direction d, where d ={north, east, south, west} • hit(s) means the robot hits the obstacle s possible actions the robot can do - turn, forward, suck-dirt, avoid a) Write possible rules that can be used to perform the room cleaning plan b) Execute this plan…arrow_forwardConsider the use of a genetic algorithm on this 0-1 Knapsack Problem W = 19 P1 = 20, w1 = 2 P2 = 30, w2 = 6 P3 = 36, w2 = 9 P4 = 16, w3 = 8 If an individual in the population is given the string: "0,1,0,1" then the measure of fitness would be?arrow_forward
- Vertex S denotes the start state and vertices G1 and G2 denote the two goal states. Directed edges are labelled with the actual costs of traversing the edge. What path from S to a goal would be found by Iterative deepening Depth-First Search? If all else is equal, consider states in alphabetic order. options are : a. S, A, B, C, D, E, F, G1 b. S, A, B, C, E, F, D, G1 c. S, A, B, C, E, F, G1 d. S, A, B, C, G1 e. S, A, C, G1 f. S, A, E, G1 g. S, B, A, C, E, G1 h. S, B, F, D, G2 i. S, C, B, F, A, D, E, G1 j. S, C, G1arrow_forwardUsing Hill-climbing search, transform the initial-state 8-puzzle to goal-sate Initial-state Goal-sate Define h as the Sum of distances of each tile from its goal position, Expand the state with minimum h at each step; the state with the minimum h will be in memory.arrow_forwardVertex S denotes the start state and vertices G1 and G2 denote the two goal states. Directed edges are labelled with the actual costs of traversing the edge. In what order would Breadth-First Search retrieve the states from the frontier when starting the search in S? If all else is equal, consider states in alphabetic order. There are two possible correct answers, depending on what variant of Breadth-First Search you are using. Select either one of them to receive full marks. options are S, A, B, C, D, E, F, G1 b. S, A, B, C, E, F, D, G1 c. S, A, B, C, E, F, G1 d. S, A, B, C e. S, A, C, G1 f. S, A, E, G1 g. S, B, A, C, E h. S, B, F, D, G2 i. S, C, B, F, A, D, E, G1 j. S, C, G1arrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
 Database System ConceptsComputer ScienceISBN:9780078022159Author:Abraham Silberschatz Professor, Henry F. Korth, S. SudarshanPublisher:McGraw-Hill Education
Database System ConceptsComputer ScienceISBN:9780078022159Author:Abraham Silberschatz Professor, Henry F. Korth, S. SudarshanPublisher:McGraw-Hill Education Starting Out with Python (4th Edition)Computer ScienceISBN:9780134444321Author:Tony GaddisPublisher:PEARSON
Starting Out with Python (4th Edition)Computer ScienceISBN:9780134444321Author:Tony GaddisPublisher:PEARSON Digital Fundamentals (11th Edition)Computer ScienceISBN:9780132737968Author:Thomas L. FloydPublisher:PEARSON
Digital Fundamentals (11th Edition)Computer ScienceISBN:9780132737968Author:Thomas L. FloydPublisher:PEARSON C How to Program (8th Edition)Computer ScienceISBN:9780133976892Author:Paul J. Deitel, Harvey DeitelPublisher:PEARSON
C How to Program (8th Edition)Computer ScienceISBN:9780133976892Author:Paul J. Deitel, Harvey DeitelPublisher:PEARSON Database Systems: Design, Implementation, & Manag...Computer ScienceISBN:9781337627900Author:Carlos Coronel, Steven MorrisPublisher:Cengage Learning
Database Systems: Design, Implementation, & Manag...Computer ScienceISBN:9781337627900Author:Carlos Coronel, Steven MorrisPublisher:Cengage Learning Programmable Logic ControllersComputer ScienceISBN:9780073373843Author:Frank D. PetruzellaPublisher:McGraw-Hill Education
Programmable Logic ControllersComputer ScienceISBN:9780073373843Author:Frank D. PetruzellaPublisher:McGraw-Hill Education
Database System Concepts
Computer Science
ISBN:9780078022159
Author:Abraham Silberschatz Professor, Henry F. Korth, S. Sudarshan
Publisher:McGraw-Hill Education
Starting Out with Python (4th Edition)
Computer Science
ISBN:9780134444321
Author:Tony Gaddis
Publisher:PEARSON
Digital Fundamentals (11th Edition)
Computer Science
ISBN:9780132737968
Author:Thomas L. Floyd
Publisher:PEARSON
C How to Program (8th Edition)
Computer Science
ISBN:9780133976892
Author:Paul J. Deitel, Harvey Deitel
Publisher:PEARSON
Database Systems: Design, Implementation, & Manag...
Computer Science
ISBN:9781337627900
Author:Carlos Coronel, Steven Morris
Publisher:Cengage Learning
Programmable Logic Controllers
Computer Science
ISBN:9780073373843
Author:Frank D. Petruzella
Publisher:McGraw-Hill Education