Artificial Intelligence: A Modern Approach
3rd Edition
ISBN: 9780136042594
Author: Stuart Russell, Peter Norvig
Publisher: Prentice Hall
expand_more
expand_more
format_list_bulleted
Concept explainers
Question
Chapter 4, Problem 7E
Program Plan Intro
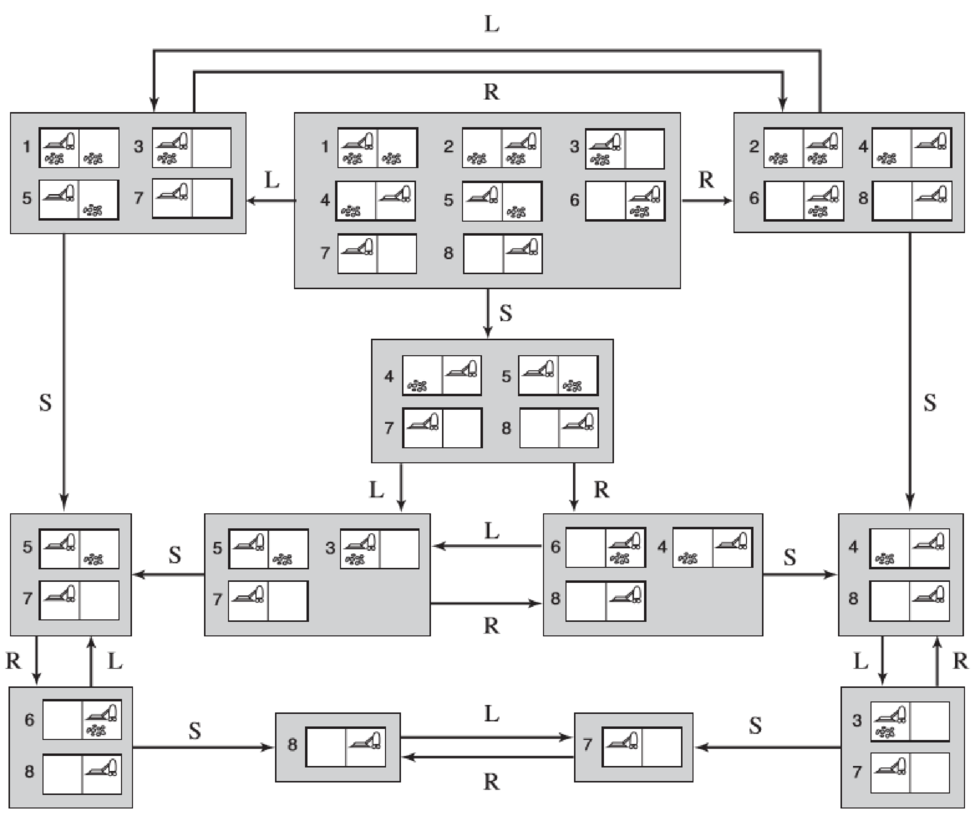
Figure 4.14:
Admissible heuristic:
A heuristic h(s) is admissible, if for every node n,
h(s) ≤ h*(s) is the true cost to reach the goal state from n
An admissible heuristic never over estimates the cost to reach the goal. That is optimistic.
Sensorless search problem defines by four items. That are given below,
- 1. Initial state
- 2. Description of action: successor function h(s) = set of action-state pairs
- 3. Goal test, can be
- Explicit
- Implicit
- 4 Path cost. It reflects the performance measure.
An admissible heuristic can be obtained by taking maximum of h*(s). Since any sequences of actions that solve all states would solve each state, this heuristic is admissible.
A* search
- The A* search algorithm is a search algorithm used to search a particular node of a graph.
- A* algorithm is a variant of the best-first algorithm based on the use of heuristic methods to achieve optimality and completeness.
- The algorithm A* is an example of a best-first search algorithm.
- If a search algorithm has the property of optimality, it means that the best possible solution is guaranteed to be found. Here, the user wants the shortest path to the final state.
Expert Solution & Answer
Want to see the full answer?
Check out a sample textbook solution
Students have asked these similar questions
Consider a best first search (BFS) algorithm that tries to find the optimal goal state with minimal cost. Consider heuristics h1, h2 with h1(n) > h2(n) for all states n. BFS with h1 is guaranteed to expand fewer nodes or an equal number of nodes to arrive at the optimal goal state than BFS with h2
Select one:
True
False
The rational agent always perform the optimal action
Select one:
True
False
Fuzzy logic is useful for both commercial and practical purposes.
Select one:
True
False
Please answer the following question in detail. With all the proofs and assumptions explained.
We have seen various search strategies in class, and analyzed their worst-case running time. Prove that any deterministic search algorithm will, in the worst case, search the entire state space. More formally, we define a search problem by a finite set of states S, a set of actions A, and a cost function c : S ×A×S → {1,∞} (i.e. the cost is uniform, but some states cannot be reached from some others, or equivalently have a cost of ∞), and a starting state s0 ∈ S. We assume that every state s ∈ S is reachable from s0, i.e. that there is a sequence of actions one can take from state s0 such that one reaches the state s after performing this sequence of actions, and such that the cost of reaching s is finite. Prove the following theorem. Theorem1. LetAlgbesomecomplete, deterministic uninformed search algorithm. Then for any search problem defined as above, there exists some choice of a state…
Q3: In the following graph, “MAIL-AGENT” is an intelligent vehicle that moves internal mail around Taibah University having a “Mail room” and other departments represented in the graph. Agent’s transit times between departments is known, and agent is required to follow a quickest circuit around the university, starting and finishing at the Mail room and visiting the Mail room and visiting each department once only.
How many circuits have to be considered to be sure of finding the optimal circuit?
Chapter 4 Solutions
Artificial Intelligence: A Modern Approach
Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, computer-science and related others by exploring similar questions and additional content below.Similar questions
- Subject : Artificial Intelligence Consider a best first search (BFS) algorithm that tries to find the optimal goal state with minimal cost. Consider heuristics h1, h2 with h1(n) > h2(n) for all states n. BFS with h1 is guaranteed to expand fewer nodes or an equal number of nodes to arrive at the optimal goal state than BFS with h2 Select one: True Falsearrow_forwardConsider the case of a simple Markov Decision Process (MDP) with a discount factor gamma = 1. The MDP has three states (x, y, and z), with rewards -1, -2, 0, respectively. State z is considered a terminal state. In states and y there are two possible actions: a₁ and a2. The transition model is as follows: In state x, action a1 moves the agent to state y with probability 0.9 and makes the agent stay put with probability 0.1. In state y, action a1 moves the agent to state with probability 0.9 and makes the agent stay put with probability 0.1. In either state or state y, action a2 moves the agent to state z with probability 0.1 and makes the agent stay put with probability 0.9. Please answer the following questions: Draw a picture of the MDP What can be determined qualitatively about the optimal policy in states x and y? Apply the policy iteration algorithm discuss in class, showing each step in full, to determine the optimal policy and the…arrow_forwarda. Given n items, where each item has a weight and a value, and a knapsack that can carry at most W You are expected to fill in the knapsack with a subset of items in order to maximize the total value without exceeding the weight limit. For instance, if n = 6 and items = {(A, 10, 40), (B, 50, 30), (C, 40, 80), (D, 20, 60), (E, 40, 10), (F, 10, 60)} where each entry is represented as (itemIdi, weighti, valuei). Use greedy algorithm to solve the fractional knapsack problem. b. Given an array of n numbers, write a java or python program to find the k largest numbers using a comparison-based algorithm. We are not interested in the relative order of the k numbers and assuming that (i) k is a small constant (e.g., k = 5) independent of n, and (ii) k is a constant fraction of n (e.g., k = n/4). Provide the Big-Oh characterization of your algorithm.arrow_forward
- Suppose we have a heuristic h that over-estimates h* by at most epsilon (i.e., for all n, 0<= h(n) <= h*(n)+epsilon). Show that A* search using h will get a goal whose cost is guaranteed to be at most epsilon more than that of the optimal goal.arrow_forwardin a graph G = (N,E,C), where N are nodes, E edges between nodes, and the weight of an edge e ∈ E is given by C(e), where C(e) > 1, for all e ∈ E. the heuristic h that counts the least amount of edges from an initial state to a goal state. now removing edges from the graph, while keeping the heuristic values unchanged. Is the heuristic still consistent?arrow_forwardSelect the appropriate characteristic for each of the following environments Note: The characteristics of the environment are determined using the following shortcuts FO: Fully Observable - PO: partially Observable SA: Single Agent - MA: Multi Agent DT: Deterministic - ST: Stochastic SQ: Sequence - EP: Episodic Backgammon Choose: Bachgammon Po ma st sq Fo sa dt sq Po sa st sq Fo ma st s1 Boker Choose: Bachgammon Po ma st sq Fo sa dt sq Po sa st sq Fo ma st s1 crossword puzzle Choose: Bachgammon Po ma st sq Fo sa dt sq Po sa st sq Fo ma st s1 Medical Diagnostic Choose: Backagammon Po ma st sq Fo sa dt sq Po sa st sq Fo ma st s1arrow_forward
- Consider the search problem represented in Figure, where a is the start node and e is the goal node. The pair [f, h] at each node indicates the value ofthe f and h functions for the path ending at that node. Given this information, what is the cost ofeach path?1. The cost < a, c >= 2 is given as a hint.2. Is the heuristic function h admissible? Explainarrow_forwardConsider the vacuum-world problem defined as shown in the following figure. a. Which of the algorithms defined in this chapter would be appropriate for this problem? Should the algorithm use tree search or graph search? b. Apply your chosen algorithm to compute an optimal sequence of actions for a 3×3 world whose initial state has dirt in the three top squares and the agent in the center. c. Will you prefer an agent with state/ memory in this scenario? d. Compare your best search agent with a simple randomized reflex agent that sucks if there is dirt and otherwise moves randomly. e. Consider what would happen if the world were enlarged to n × n. How does the performance of the search agent and of the reflex agent vary with n?arrow_forwardConsider the following propositions: p="It is cloudy" q="It is rainy" r="I will play outside" s="I will stay at home" Select the inverse (s) of the follwing sentence: "I will stay at home and I will not play outside unless it is neither cloudy nor rainy"arrow_forward
- Please answer the following question in full detail. Please be specifix about everything: You have learned before that A∗ using graph search is optimal if h(n) is consistent. Does this optimality still hold if h(n) is admissible but inconsistent? Using the graph in Figure 1, let us now show that A∗ using graph search returns the non-optimal solution path (S,B,G) from start node S to goal node G with an admissible but inconsistent h(n). We assume that h(G) = 0. Give nonnegative integer values for h(A) and h(B) such that A∗ using graph search returns the non-optimal solution path (S,B,G) from S to G with an admissible but inconsistent h(n), and tie-breaking is not needed in A∗.arrow_forwardTrue or False: - Best-first search is optimal in the case where we have a perfect heuristic (i.e., h(?) = h∗(?), the true cost to the closest goal state). - Suppose there is a unique optimal solution. Then, A* search with a perfect heuristic will never expand nodes that are not in the path of the optimal solution.- A* search with a heuristic which is admissible but not consistent is complete.arrow_forwardA seller has an indivisible asset to sell. Her reservation value for the asset is s, which she knows privately. A potential buyer thinks that the assetís value to him is b, which he privately knows. Assume that s and b are independently and uniformly drawn from [0, 1]. If the seller sells the asset to the buyer for a price of p, the seller's payoff is p-s and the buyer's payoffis b-p. Suppose simultaneously the buyer makes an offer p1 and the seller makes an offer p2. A transaction occurs if p1>=p2, and the transaction price is 1/2 (p1 + p2). Suppose the buyer uses a strategy p1(b) = 1/12 + (2/3)b and the seller uses a strategy p2(s) = 1/4 + (2/3)s. Suppose the buyer's value is 3/4 and the seller's valuation is 1/4. Will there be a transaction? Explain. Is this strategy profile a Bayesian Nash equilibrium? Explain.arrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
 Operations Research : Applications and AlgorithmsComputer ScienceISBN:9780534380588Author:Wayne L. WinstonPublisher:Brooks Cole
Operations Research : Applications and AlgorithmsComputer ScienceISBN:9780534380588Author:Wayne L. WinstonPublisher:Brooks Cole
Operations Research : Applications and Algorithms
Computer Science
ISBN:9780534380588
Author:Wayne L. Winston
Publisher:Brooks Cole