System Dynamics
3rd Edition
ISBN: 9780077509125
Author: Palm
Publisher: MCG
expand_more
expand_more
format_list_bulleted
Concept explainers
Videos
Textbook Question
Chapter 9, Problem 9.35P
A mass-spring-damper system is described by the model mx -I- ci + kx = f(t)
where m = 0.25 slug, c = 2 lb-sec/ft, k = 25 lb/ft, and /(z) (lb) is the externally applied force shown in Figure P9.35. The forcing function can be expanded in a Fourier series as follows:

Find an approximate description of the output x14(/) at steady state, using only those input components that lie within the bandwidth.
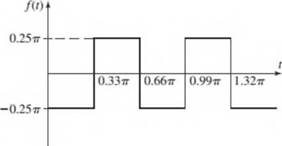
Figure P9.3S
Expert Solution & Answer
Want to see the full answer?
Check out a sample textbook solution
Students have asked these similar questions
(b) Consider a vertical spring mass-damper-system with mass m = 2 kg, damping coefficient c = 5 N.s/m
and stiffness k = 10 N/m. An external force f(t) = sin3t N is applied to the mass.
(i) Find the static equilibrium position as measured from the un-stretched length of the spring
(ii) Write the equation of motion.
(iii) Find the natural and damped frequencies.
(iv) In steady state, find the time delay in seconds between the mass position and f(t).
(v) Find the steady state maximum acceleration.
Q3.Consider a spring–mass–damper system with m = 80 kg, c = 15 kg/s, and k = 1500 N/m with an impulse force applied to it of 1200 N for 0.01 s.
(C) Calculate the damped natural frequency of the system (D) Calculate the system response to the impulsive force at time t = 1 s
The block diagram given below;
A) Reduce it
B) G1(s)=2/s ; G2(s)=1/4s+2 ; G3(s)=4 ;H(s)=0.5 Given the values of the system; find the time constant, its natural frequency and damping rate and explain what kind of dynamic behavior it exhibits accordingly.
C)Find the poles and zeros of the system according to the values in (B).Is the system stable? Find the unit step response (Inverse Laplace).
Chapter 9 Solutions
System Dynamics
Ch. 9 - Prob. 9.1PCh. 9 - 9.3 Figure P9.3 is a representation of the effects...Ch. 9 - Prob. 9.4PCh. 9 - 9.5 For the rotational system shown in Figure...Ch. 9 - Prob. 9.6PCh. 9 - Prob. 9.7PCh. 9 - Prob. 9.8PCh. 9 - Prob. 9.9PCh. 9 - Prob. 9.10PCh. 9 - Prob. 9.11P
Ch. 9 - Prob. 9.12PCh. 9 - Prob. 9.13PCh. 9 - Prob. 9.14PCh. 9 - 9.16 A model of a fluid clutch is shown in Figure...Ch. 9 - Prob. 9.17PCh. 9 - Prob. 9.18PCh. 9 - Prob. 9.19PCh. 9 - Prob. 9.20PCh. 9 - Prob. 9.21PCh. 9 - An electronics module used to control a large...Ch. 9 - Prob. 9.23PCh. 9 - Prob. 9.24PCh. 9 - Prob. 9.25PCh. 9 - Prob. 9.26PCh. 9 - Prob. 9.27PCh. 9 - Prob. 9.28PCh. 9 - Prob. 9.29PCh. 9 - Prob. 9.30PCh. 9 - Prob. 9.31PCh. 9 - Prob. 9.32PCh. 9 - Prob. 9.33PCh. 9 - Prob. 9.34PCh. 9 - A mass-spring-damper system is described by the...Ch. 9 - Prob. 9.37PCh. 9 - Prob. 9.38P
Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, mechanical-engineering and related others by exploring similar questions and additional content below.Similar questions
- Suppose a spring mass damper system with k=4000N/m, m=10kg,and c=40N-s/m Find the steady-state and total response of the system under harmonic force F(t)=200 cos t N and the initial conditions x0=0.1m and ̇x0'=0arrow_forward1.block diagram physical meaning and the time response for different inputsarrow_forwardMECH Vibrations: Arbitrary input function A forcing function equivalent to an absolute sine function (i.e., |sin(x)|), with a magnitude of F0,and period of T, is applied at t = 0 [s] to a spring-mass system with the following parameters: F = F0*|sin(x)|m = 72 [kg]k = 112 [N/m]F0 = 721 T = 9 dt = 9/1000 x0 = 1 m/sv0 = -1 m/s Using numerical methods, solve for the response of the system.arrow_forward
- Graph/Plot the output step response from t=0 to t=10 with a 0.1-second interval.arrow_forwardFor the systems illustrated below, find the natural frequencies, mode shapes and general responses for a block that slides on a cart. Neglect all frictions in contact.arrow_forwardIt is observed from the magnitude plot of a compliance transfer function of a mass spring damper that the value at a very small frequency 0.0001 is 3.71 meters and at resonance 1.10 rad/s is 7.10 meters. What is the natural frequency, damping coefficient, stiffness, and mass of the system?arrow_forward
- Please show all work. will upvote, thanks An input force f = F‧sin(ωt) is applied to the body in both systems along the direction x. -Which of the two systems performs better in the frequency domain in terms of reducing the steady-state displacement amplitude X of the body ? Known are: m = 1kg, c = 5 Ns/m and k = 100 N/m?arrow_forwardSuppose a spring with spring constant 7 N/m is horizontal and has one end attached to a wall and the other end attached to a 2 kg mass. Suppose that the friction of the mass with the floor (i.e., the damping constant) is 1 N⋅s/m a) Set up a differential equation that describes this system. Let x to denote the displacement, in meters, of the mass from its equilibrium position, and give your answer in terms of x,x′,x′′. Assume that positive displacement means the mass is farther from the wall than when the system is at equilibrium. b) Find the general solution to your differential equation from the previous part. Use c1 and c2 to denote arbitrary constants. Use t for independent variable to represent the time elapsed in seconds. Your answer should be an equation of the form x=… c) Enter a value for the damping constant that would make the system critically damped. ?Ns/marrow_forwardQ.1 - The open loop transfer function for a unity - feedback systemis G(s)= XL‘ 7xs and r(t)=3t determine steady state error.If it is desired to reduce this existing error by 7% fined new value of gain of the system.arrow_forward
- The figure that is attached illustrates a system in which a force F is applied to a mass m2 that is connected to another mass m1 via a spring and a damper, and mass m1 is connected to a wall via a damper. The equations of motion that govern the time evolution of the mass displacements, y1(t)and y2(t), are given below. A) Define 4 state variables of the system (xi, i = 1,…,4) as phase variables, and define the control input u. Convert the two equations of motion above into four 1st-order ODEs that are functions of the state variables and the control input.(b) Write the four 1st -order ODEs from part (a) in state-space form,x = Ax+Bu.arrow_forwardA certain mass is driven by base excitation through a spring (Figure P4.13). Its parameter values are m = 100 kg, c = 1000 N * s/m, and k = 10,000 N/m. Determine its peak frequency w_p, it’s peak M_p, and its bandwidth.arrow_forwardGiven an oscillator of mass 2.0kg and spring constant of 180N/m, what is the period without damping? Use numerical methods to model this oscillator with an additional friction force equal to where c is a positive damping constant. Using c=5.0, what is the new period of oscillation. What about for c=10? Assume initial position is 0.2m and initial velocity is zero. Please find the period using the position versus time plot and use the first full cycle of the motion.arrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
 Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Elements Of Electromagnetics
Mechanical Engineering
ISBN:9780190698614
Author:Sadiku, Matthew N. O.
Publisher:Oxford University Press
Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:9780134319650
Author:Russell C. Hibbeler
Publisher:PEARSON
Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:9781259822674
Author:Yunus A. Cengel Dr., Michael A. Boles
Publisher:McGraw-Hill Education
Control Systems Engineering
Mechanical Engineering
ISBN:9781118170519
Author:Norman S. Nise
Publisher:WILEY
Mechanics of Materials (MindTap Course List)
Mechanical Engineering
ISBN:9781337093347
Author:Barry J. Goodno, James M. Gere
Publisher:Cengage Learning
Engineering Mechanics: Statics
Mechanical Engineering
ISBN:9781118807330
Author:James L. Meriam, L. G. Kraige, J. N. Bolton
Publisher:WILEY
Ch 2 - 2.2.2 Forced Undamped Oscillation; Author: Benjamin Drew;https://www.youtube.com/watch?v=6Tb7Rx-bCWE;License: Standard youtube license