
Videos
The steady-state error due to a unit-ramp command and due to a unit-ramp disturbance of I controller with an internal feedback loop of first order plant for the given cases.
Answer to Problem 10.28P
The steady-state error values for all the cases are:
Case 1. For
Error due to unit-ramp command:
Error due to unit-ramp disturbance:
Case 2. For
Error due to unit-ramp command:
Error due to unit-ramp disturbance:
Case 3. For a root separation factor of 10,
Error due to unit-ramp command:
Error due to unit-ramp disturbance:
Explanation of Solution
Given:
The I controller with an internal feedback loop of first order plant is as shown below:
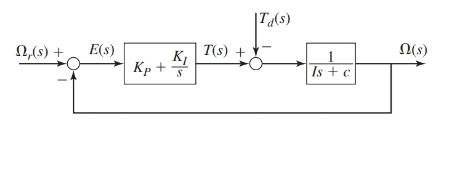
Where, the parameter values are as given:
Also, the performance specifications require the time constant of the system to be
The values of gains for the I controller are as follows:
Case 1. For
Case 2. For
Case 3. For a root separation factor of 10,
Concept Used:
- The transfer functions for the block diagram are as shown below:
- The steady-state error of a system using final value theorem is:
Calculation:
From the block diagram as shown, the transfer functions are as:
Therefore, the response
And from the block diagram shown in figure, we have
On keeping the values of the parameters such that
Case 1. When
Since,
Therefore, for unit-ramp command response
Thus, the steady-state error for this design is:
Therefore, for zero command response
Thus, the steady-state error for this design is:
Case 2. When
Since,
Therefore, for unit-ramp command response
Thus, the steady-state error for this design is:
Therefore, for zero command response
Thus, the steady-state error for this design is:
Case 3. For a root separation factor of 10,
Since,
Therefore, for unit-ramp command response
Thus, the steady-state error for this design is:
Therefore, for zero command response
Thus, the steady-state error for this design is:
Conclusion:
The steady-state error values for all the cases are:
Case 1. For
Error due to unit-ramp command:
Error due to unit-ramp disturbance:
Case 2. For
Error due to unit-ramp command:
Error due to unit-ramp disturbance:
Case 3. For a root separation factor of 10,
Error due to unit-ramp command:
Error due to unit-ramp disturbance:
Want to see more full solutions like this?
Chapter 10 Solutions
SYSTEM DYNAMICS LL+CONNECT


 Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY