
SYSTEM DYNAMICS LL+CONNECT
3rd Edition
ISBN: 9781264201891
Author: Palm
Publisher: MCG CUSTOM
expand_more
expand_more
format_list_bulleted
Concept explainers
Videos
Textbook Question
Chapter 10, Problem 10.69P
10.69 Figure P10.7 shows a system for controlling the angular position of a load.
such as an antenna. Figure Pl0.69 shows the block diagram for PD control of this system using a field-controlled motor. Use the following values:

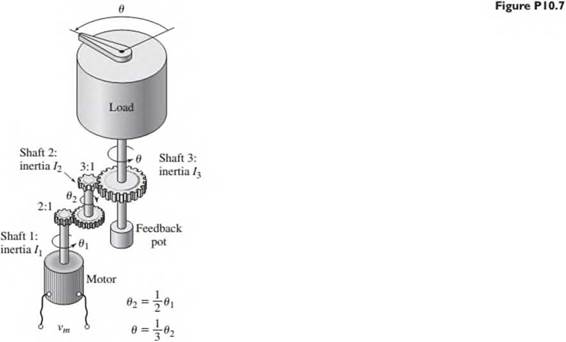
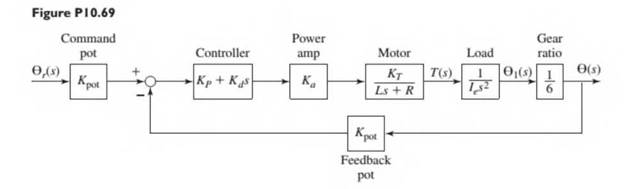
The inertia /, in the block diagram is the equivalent inertia of the entire system, as felt on the motor shaft.
- Assume that the motor inductance is very small and set L = 0. Compute 4, obtain the transfer function 0(s)/0r(s), and compute the values of the control gains Kp and Kj to meet the following specifications: < = 1 and t = 0.5 s.
Expert Solution & Answer
Want to see the full answer?
Check out a sample textbook solution
Students have asked these similar questions
For Problem 19.27 , determine the probability (assuming normal distribution) that a car would need engine maintenance between 70,000 and 90,000 kilometers.
For the following automatic control systems commonly encountered in daily life, identify the devices that perform the measurement (M), decision (D), and action (A) functions, and classify the action function as “On/Off’ or “Regulating” (time-varying until reaching a setpoint). Also, draw a sketch of the control loop for each system and determine whether the control is feedback or feedforward.
Automatic sprinkler system for fires
Automobile cruise speed control
Refrigerator
Define linear impulse.
Chapter 10 Solutions
SYSTEM DYNAMICS LL+CONNECT
Ch. 10 - Prob. 10.1PCh. 10 - 10.2 Draw the block diagram of a system using...Ch. 10 - Prob. 10.3PCh. 10 - Prob. 10.4PCh. 10 - Prob. 10.5PCh. 10 - Prob. 10.8PCh. 10 - Prob. 10.9PCh. 10 - Prob. 10.12PCh. 10 - Prob. 10.13PCh. 10 - Prob. 10.14P
Ch. 10 - Prob. 10.15PCh. 10 - Prob. 10.16PCh. 10 - Prob. 10.17PCh. 10 - Prob. 10.19PCh. 10 - Prob. 10.20PCh. 10 - Prob. 10.21PCh. 10 - Prob. 10.22PCh. 10 - Prob. 10.23PCh. 10 - Prob. 10.24PCh. 10 - Consider the PI speed control system shown in...Ch. 10 - Prob. 10.26PCh. 10 - Prob. 10.27PCh. 10 - Prob. 10.28PCh. 10 - Prob. 10.29PCh. 10 - Prob. 10.30PCh. 10 - Prob. 10.31PCh. 10 - Prob. 10.32PCh. 10 - Prob. 10.33PCh. 10 - Prob. 10.34PCh. 10 - Prob. 10.35PCh. 10 - Prob. 10.36PCh. 10 - For the designs found in part (a) of Problem...Ch. 10 - Prob. 10.39PCh. 10 - Prob. 10.40PCh. 10 - Prob. 10.41PCh. 10 - Prob. 10.44PCh. 10 - Prob. 10.45PCh. 10 - Prob. 10.46PCh. 10 - For the system shown in Figure 10.7.1, / = c = 1....Ch. 10 - Prob. 10.48PCh. 10 - Prob. 10.51PCh. 10 - Prob. 10.52PCh. 10 - Prob. 10.53PCh. 10 - Prob. 10.54PCh. 10 - Prob. 10.56PCh. 10 - Prob. 10.57PCh. 10 - Prob. 10.58PCh. 10 - Prob. 10.59PCh. 10 - Prob. 10.60PCh. 10 - Prob. 10.61PCh. 10 - Prob. 10.62PCh. 10 - Prob. 10.63PCh. 10 - Prob. 10.64PCh. 10 - Prob. 10.65PCh. 10 - Consider Example 10.6.3. Modify the diagram in...Ch. 10 - Prob. 10.67PCh. 10 - 10.68 Consider Example 10.6.4. Modify the diagram...Ch. 10 - 10.69 Figure P10.7 shows a system for controlling...Ch. 10 - A speed control system using an...Ch. 10 - Prob. 10.72PCh. 10 - Prob. 10.73PCh. 10 - Prob. 10.74PCh. 10 - Consider Example 10.7.4. Use the diagram in Figure...Ch. 10 - Prob. 10.76PCh. 10 - Refer to Figure 10.3.9, which show s a speed...Ch. 10 - For the system in Problem 10.77 part (a), create a...
Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, mechanical-engineering and related others by exploring similar questions and additional content below.Similar questions
- Consider a 2R planar manipulator with l1 = 1m, l2 = 1m. The final position is P1( X= 1.1m, Y=1.5m). Find θ1 and θ2 for the left and the right.arrow_forwardProblem Solving. Solve the following problems completely. 5. Motors from two different manufacturers are being considered for application.Both motors are 50Hp, 460 volts, 3 phase, 60 cycles. Motor A operates at 80%efficiency and motor B operates at 89% efficiency. The expected need for themotor is 15 years. Motor A cost P120, 000.00 and motor B P150, 000.00.Electrical energy cost P8.00 per Kw-Hr and the motors will be operating 8 hoursper day, 250 days a year. Assume taxes and insurance are 3% of first cost. Whichmotor should be purchased?arrow_forwarduse the seize-and-fix methodology to determine the degrees of freedom of the following systemarrow_forward
- In a belt drive design, the angle of wrap correction factor C θ is a function of the angle of wrap of the belt on the small sheave. If in a design, the angle of wrap of the belt on the small sheave is 1500 , then C θ = ________ 0 .arrow_forwardDetermine if the system is undamped, critically damped, under damped, or over damped. For the under damped, calculate peak time, settling time, and percent overshootarrow_forwardA punching machine requires 1600 ft-lb of energy to punch a certain hole. During the punching operation, the speed of the machine is reduced from 180 rpm to 160 rpm. The weight of the arms and hub is considered to be 10 % of the rim weight, and the mean diameter of the flywheel is 32 inches. a) What is the mean or operating rpm of the flywheel? b) Find the coefficient of fluctuation. c) What is the maximum speed of the flywheel, in fps? d) What is the minimum speed of the rim, in fps? d) Determine the weight of the rim, in lb. e) What is the weight of the flywheel, in lb? f) Determine the weight of the arms and hub, in lb.arrow_forward
- Develop MATLAB code to model Qacm with a fixed outlet temp of T= 870K. Optimizing componentsarrow_forwardA control valve is used to manipulate a liquid flowrate in the flowrate control loop. Figure 2 shows the flow characteristic of the control valve.Determine the following: i. Type of flow characteristic of the control valve.ii. Flowrate through the valve if the valve travel is 45%. Noted that the flowrate of the liquid is 70 000 lb/h when the valve is fully opened.iii. The maximum flow coefficient of the control valve, if the density of the liquid is half of the density of water and the pressure drop across the valve is 10 psi.arrow_forward10- The laplace transform of output variable to laplace transform of input variable is called as control system. Select one: True Falsearrow_forward
- Calculate the unit cycle time for a 190 t mining truck loaded by an excavator with a nominal bucket volume of 30m requiring 4 passes with the following operational time- duration data: Excavator loading time = 36 seconds per loading pass Truck travelling time = 351 seconds per truck Truck dumping time = 22 seconds per truck Unloaded truck Travelling back time = 181 seconds per truck Truck queuing or waiting time = 75 seconds/truck Excavator-truck spotting time = 14 seconds/truckarrow_forwardExplain Quick Return Mechanism along with commercial application.arrow_forwardA drive has the following parametersMotor torque: T=150 –0.1N, N-m where N is the speed in rpm.Load torque: TL=100, N-m.Initially the drive is operating in steady state. The characteristics of the loadtorque are changed to TL =-100 Nm.(i) Calculate the initial and final equilibrium speeds.(ii) Can a motor load system with a passive load torque have an equilibrium speedin quadrant II ? What will be your answer if the load is active?arrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
 Principles of Heat Transfer (Activate Learning wi...Mechanical EngineeringISBN:9781305387102Author:Kreith, Frank; Manglik, Raj M.Publisher:Cengage Learning
Principles of Heat Transfer (Activate Learning wi...Mechanical EngineeringISBN:9781305387102Author:Kreith, Frank; Manglik, Raj M.Publisher:Cengage Learning Refrigeration and Air Conditioning Technology (Mi...Mechanical EngineeringISBN:9781305578296Author:John Tomczyk, Eugene Silberstein, Bill Whitman, Bill JohnsonPublisher:Cengage Learning
Refrigeration and Air Conditioning Technology (Mi...Mechanical EngineeringISBN:9781305578296Author:John Tomczyk, Eugene Silberstein, Bill Whitman, Bill JohnsonPublisher:Cengage Learning
Principles of Heat Transfer (Activate Learning wi...
Mechanical Engineering
ISBN:9781305387102
Author:Kreith, Frank; Manglik, Raj M.
Publisher:Cengage Learning
Refrigeration and Air Conditioning Technology (Mi...
Mechanical Engineering
ISBN:9781305578296
Author:John Tomczyk, Eugene Silberstein, Bill Whitman, Bill Johnson
Publisher:Cengage Learning
Physics - Thermodynamics: (21 of 22) Change Of State: Process Summary; Author: Michel van Biezen;https://www.youtube.com/watch?v=AzmXVvxXN70;License: Standard Youtube License