
CONTROL SYSTEMS ENGINEERING
7th Edition
ISBN: 9781119185666
Author: NISE
Publisher: WILEY
expand_more
expand_more
format_list_bulleted
Concept explainers
Videos
Textbook Question
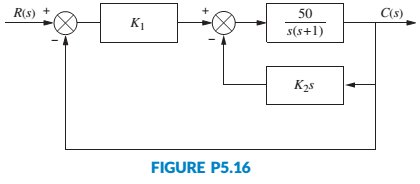
Chapter 5, Problem 16P
For the system of Figure P5.16, find the values of K1and K2to yield a peak time of 1 second and a settling time of 2 seconds for the closed-loop system’s step response. (Section: 5.3]
Expert Solution & Answer
Want to see the full answer?
Check out a sample textbook solution
Students have asked these similar questions
Question 5:
A model for a single joint of a robotic manipulator is shown in Figure below. The usual notation is used.
The gear inertia is neglected and the gear reduction ratio is taken as 1:r (Note: r < 1).
a) Draw a linear graph for the model, assuming that no external (load) torque is present at the robot
arm.
b) Using the linear graph derive a state model for this system. The input is the motor magnetic torque
Tm and the output is the angular speed o, of the robot arm. What is the order of the system?
Jm
m
(viscous)
1:r
Motor
Robot Arm
Gear Box
(Light)
Q5: For the following block diagram find the
(control ratio C(s)/R(s
CLO
Hy
1. For the following mechanical translational system
a. Write two differential equations of
Order in
s domain
b. Change to time domain, and choose state variables
c. Write the state equations, and the state matrix equation
d. Write the output equation if x2 is the output
Hint: the state variables will be x1, V1, X2, V2
X(1)
fv,
At)
KI
oll
K3
M
K2
0000
0000
Chapter 5 Solutions
CONTROL SYSTEMS ENGINEERING
Ch. 5 - Prob. 1RQCh. 5 - Name three basic forms for interconnecting...Ch. 5 - For each of the forms in Question 2, state...Ch. 5 - Besides knowing the basic forms as discussed in...Ch. 5 - For a simple, second-order feedback control system...Ch. 5 - Prob. 6RQCh. 5 - Prob. 7RQCh. 5 - How are summing junctions shown on a signal-flow...Ch. 5 - If a forward path touched all closed loops, what...Ch. 5 - Name five representations of systems in state...
Ch. 5 - Prob. 11RQCh. 5 - Which form of the state-space representation leads...Ch. 5 - When the system matrix is diagonal, what...Ch. 5 - What terms lie along the diagonal for a system...Ch. 5 - Prob. 15RQCh. 5 - Prob. 16RQCh. 5 - For what kind of system would you use the observer...Ch. 5 - Describe state-vector transformations from the...Ch. 5 - Prob. 19RQCh. 5 - Prob. 20RQCh. 5 - Prob. 21RQCh. 5 - Find the closed-loop transfer function, T(s) =...Ch. 5 - Find the equivalent transfer function, T(s) =...Ch. 5 - Reduce the system shown in Figure P5.4 to a single...Ch. 5 - Reduce the block diagram shown in Figure P5.6 to a...Ch. 5 - Find the unity feedback system that is equivalent...Ch. 5 - 8. Given the block diagram of a system shown in...Ch. 5 - 9. Reduce the block diagram shown in Figure P5.9...Ch. 5 - Reduce the block diagram shown in Figure P5.10 to...Ch. 5 - 11. For the system shown in Figure P5.11, find the...Ch. 5 - 12. For the system shown in Figure P5.12, find the...Ch. 5 - Prob. 13PCh. 5 - For the system of Figure P5.14, find the value of...Ch. 5 - 15. For the system shown in Figure P5.15, find K...Ch. 5 - For the system of Figure P5.16, find the values of...Ch. 5 - Find the following for the system shown in Figure...Ch. 5 - 18. For the system shown in Figure P5.18, find ,...Ch. 5 - Prob. 19PCh. 5 - Prob. 20PCh. 5 - Find the transfer function G(s) = Eo(s)/T(s) for...Ch. 5 - Prob. 22PCh. 5 - Prob. 23PCh. 5 - State Space SS
24. Given the system below, draw a...Ch. 5 - Prob. 25PCh. 5 - Using Mason’s rule, find the transfer function,...Ch. 5 - Using Mason’s rule, find the transfer function,...Ch. 5 - Prob. 28PCh. 5 - Use block diagram reduction to find the transfer...Ch. 5 - State Space SS 30. Represent the following systems...Ch. 5 - Prob. 31PCh. 5 - State Space SS 32. Repeat Problem 31 and represent...Ch. 5 - Prob. 33PCh. 5 - Prob. 34PCh. 5 - Repeat Problem 34 for the system shown in Figure...Ch. 5 - Prob. 37PCh. 5 - State Space SS 38. Consider the rotational...Ch. 5 - Prob. 40PCh. 5 - Prob. 41PCh. 5 - State Space SS
42. Consider the subsystems shown...Ch. 5 - Prob. 43PCh. 5 - Prob. 44PCh. 5 - State Space SS
45. Diagonalize the following...Ch. 5 - Prob. 46PCh. 5 - Prob. 48PCh. 5 - Prob. 51PCh. 5 - Figure P5.33 shows a noninverting operational...Ch. 5 - Figure P5.34 shows the diagram of au inverting...Ch. 5 - Prob. 54PCh. 5 - A car active suspension system adds an active...Ch. 5 - Prob. 58PCh. 5 - Prob. 60PCh. 5 - Some medical procedures require the insertion of a...Ch. 5 - Prob. 62PCh. 5 - Prob. 64PCh. 5 - Prob. 65PCh. 5 - The purpose of an Automatic Voltage Regulator is...Ch. 5 - 68. Integrated circuits are manufactured through a...Ch. 5 - Prob. 69PCh. 5 - Prob. 72PCh. 5 - Prob. 73PCh. 5 - Assume ideal operational amplifiers in the circuit...Ch. 5 - Parabolic trough collector. Effective controller...
Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, mechanical-engineering and related others by exploring similar questions and additional content below.Similar questions
- Part A: Find the steady-state solution of the mechanical system shown below: k mu E m G(s) F(t) F(t) = F sin wt Part B: Sketch the root locus for the transfer function: Ks (s+ 4) (s + 3)(s + 1)arrow_forwardMechanics of machines QUESTION 4 Consider two degree of freedom of coupled pendulum with horizontal rod vibration system are shown in figure 4. MA KG. oooo MB BAW a Figure 4 k d L 4.1- Determine differential equations of motion in matrix form using The equation of equation with, and ß as generalized coordinates; 4.2- Develop state-space model.arrow_forwardGiven a state space model [1 1 + 0 u -1 -2 y = [1 1 0] with input u and output y. a). Derive the transfer function representation. b). Derive the differential equations representation. c). Compute the response y(t) with step control input u(t) = 1(t) and zero initial condition. d). and initial condition r(0) = [11 0]". Compute the state response r(t) with control input u(t) = 1(t)arrow_forward
- 1. For the following mechanical translational system a. Write two differential equations of Order in s domain b. Change to time domain, and choose state variables c. Write the state equations, and the state matrix equation d. Write the output equation if x2 is the output Hint: the state variables will be x1, V1, X2, V2 fv, fit), K3 M K2 M2 0000arrow_forwardUse MATLAB to obtain a state model for the following equations; obtain the expressions for the matrices A, B, C, and D. In both cases, the input is f(t); the output: is y. a. 5d³yd²y +7. b. dy +3 dt³ dt² dt Y(s) 5 = F(s) s² +7s+4 - +6y=f(t)arrow_forward3. Consider the system shown below. The outputs of the system are the angular displacement of the upper gear (positive about the x-axis) and the Contact force between the upper and lower gear. Assume that the initial conditions for all state variables are zero and that the gears are massless. There are two inputs Ti(t) acting on the top gear and T₂(t) acting on the rightmost disk. If you let • 9₁ denote the state variable for the spring 92 denote the state variable for the rightmost disk. u₁ denote T₁. u₂ denote T₂. You should expect to get the following state space representation and 9= KR + 0₁ 0 LIR -1. 7/2 Ti(t) Jun 0:0⁰ 40² T₂(t) 03 Figure 3: System for problem 3 21 (a) Derive the state-space model (state equation and output equation) in vector form. (b) For the system parameters I = 8 kg m², k = 1 N m,b=2 N s m/rad, R₁ = 1 m, and R₂ = 3 m: i. Use MATLAB to determine the transfer function matrix [G(s)]. ii. What is the ristic equation AS the system? iii. What are the values of the…arrow_forward
- Find: State-space representation Note: Output of mechanical system is X3(t) Given: M1=1 kg, M2=1 kg, M3=1 kg K1=1 N/m, K2=1 N/m Fv1=1 N-s/m, Fv2=1 N-s/m, Fv3=1 N-s/m, Fv4=1 N-s/marrow_forwardParameters of the following transfer function is given as: k=6, a=3.1, b=3.4, and c=2.8, determine the settling time Ts of the system response to a unit step input. (please keep four digits after decimal point) TF= k as²+bs+carrow_forward3- Nise (4.4) A unity feedback control system has the following open-loop transfer function: G(s) = 45+¹ Find expressions for 4s+1 45² its time response when is subjected to unit impulse input.arrow_forward
- Derive the state-space model (state equation and output equation) in vector form for the following system. The system outputs are the displacements of each spring. Assume that the connection between the spring and rope is massless and that the rope is inextensible. Assume that gravity is an input as well as the applied forces Fi(t) and F2(t). Neglect friction forces on mass m₂. If q₁ is the state variable for the bottom spring connected to m₁, q2 is the state variable for the mass m₁, q3 is the the top spring connected to the pulley, and q4 is the state variable connected to the mass m2, then you should expect to get the following state-space representation: 92 43 y 0 LaLa (L+L) 0 4₂ kL₂ mi Li 0 m2 0 13 (L+L) 0 CA = - [8] 92 93 + 92 93 + L94 m₂ F₂(t) m₂ TOL F₂(t) Figure 2: Diagram for problem 2 X5 00 X2 [000] 00 U₁ U12 U13 m₂. 21 142 143arrow_forwardFor the system shown in the figure. the system parameters, the length of the rod, l is 2 m, mass of the rigid rod, m is 7, and the stiffness of the springs, k, is the last two digits of 57. Derive the equation of motion, b) Find the transfer function between force input (F) and angular displacement (θ) of the system c) Find the step response of the system, and show time-domain characteristics of the system d) Find the frequency response function, and draw frequency response graphs, and draw bode diagrams, show frequency-domain characteristics.arrow_forward1 / 1 Problem No. 1 1A. 100% + 1B. Consider the translational mechanical system shown in Figure P4.17. A 1-pound force, f(t), is applied at t = 0. If fy = 1, find K and M such that the response is characterized by a 4-second settling time and a 1-second peak time. Also, what is the resulting percent overshoot? [Section: 4.6] 70) 0000 31/1 10000 K FIGURE P4.17 Given the translational mechanical system of Figure P4.17, where K = 1 and f(1) is a unit step. find the values of M and ƒ, to yield a response with 17% overshoot and a settling time of 10 seconds. [Section: 4.6]arrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
 Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Elements Of Electromagnetics
Mechanical Engineering
ISBN:9780190698614
Author:Sadiku, Matthew N. O.
Publisher:Oxford University Press
Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:9780134319650
Author:Russell C. Hibbeler
Publisher:PEARSON
Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:9781259822674
Author:Yunus A. Cengel Dr., Michael A. Boles
Publisher:McGraw-Hill Education
Control Systems Engineering
Mechanical Engineering
ISBN:9781118170519
Author:Norman S. Nise
Publisher:WILEY
Mechanics of Materials (MindTap Course List)
Mechanical Engineering
ISBN:9781337093347
Author:Barry J. Goodno, James M. Gere
Publisher:Cengage Learning
Engineering Mechanics: Statics
Mechanical Engineering
ISBN:9781118807330
Author:James L. Meriam, L. G. Kraige, J. N. Bolton
Publisher:WILEY
Introduction to Undamped Free Vibration of SDOF (1/2) - Structural Dynamics; Author: structurefree;https://www.youtube.com/watch?v=BkgzEdDlU78;License: Standard Youtube License