
Videos
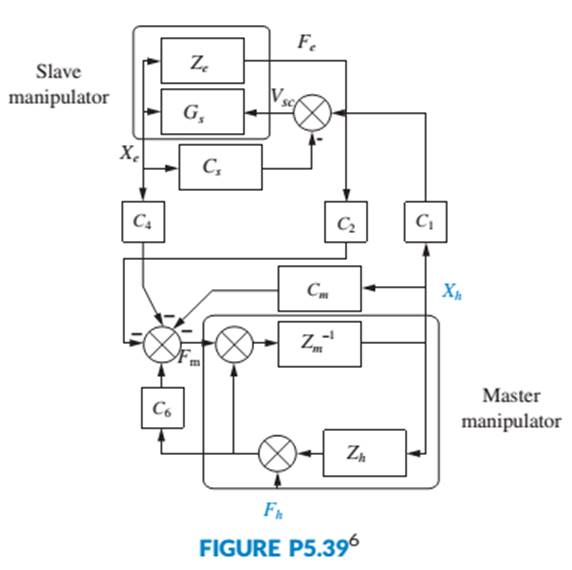
Some medical procedures require the insertion of a needle under a patient’s skin using CT scan monitoring guidance for precision. CT scans emit radiation, posing some cumulative risks for medical personnel. To avoid this problem, a remote control robot has been developed (Piccin, 2009). The robot controls the needle in position and angle in the constraint space of a CT scan machine and also provides the physician with force feedback commensurate with the insertion opposition encountered by the type of tissue in which the needle is inserted. The robot has other features that give the operator the similar sensations and maneuverability as if the needle was inserted directly. Figure P5.39 shows the block diagram of the force insertion
a. Assuming
b. Now with
Want to see the full answer?
Check out a sample textbook solution
Chapter 5 Solutions
CONTROL SYSTEMS ENGINEERING


- 1. For the linkage system show, Link 1 moves along the vertical direction via a linear motor. Link 2 and 3,,dependent on the motion of Link 1, will move accordingly. Perform position analysis using Chace Mehod: Draw the loop closure vectors for the problem. (a) (b) Determine the unknowns. (c) Determine which kinematic case it is (d) Determine equations for the unknowns as function of known variables. (e) Assume link 1 is located 3 inches above the x-y coordinates, and link 2 has a length of 5 inches. Determine the numerical values of the two unknowns for this specific configuration. Link 1 X Link 2 Link 3arrow_forwardQ4) In Fig.2, The location of the tool, 77 is not accurately known. Using force control, the robot feels around with the tool tip until it inserts it into the socket (or Goal) at loca- tiongr. Once in this "calibration" configuration (in which (G) and (T) are coincident), the position of the robot, is figured out by reading the joint angle sensors and com- puting the kinematics. Assuming T and T are known, give the transform equation to compute the un- known tool frame,T. 2 Fig.2arrow_forwardExample 1.1 Figure 1.5 shows the block diagram of a closed-loop flow control system. Identify the following elements: (a) the sensor, (b) the transducer, (c) the actuator, (d) the transmitter, (e) the controller, (f) the manipulated variable, and (g) the measured variable. In the figure above, the (a) sensor is labeled as the pressure cell. The (b) transducer is labeled as the converter. However, there are two converters: one for converting pressure to current, and another converting current to pressure for operating the actuator. The (c) actuator is labeled as the pneumatic valve. The (d) transmitter is labeled as the line driver. The (e) controller is labeled as the PLC. The (f) manipulated variable is labeled as the pressure developed by the fluid flowing through the orifice plate. The (g) measured variable is the flow rate of the liquid.arrow_forward
- Consider two robot-manipulators:• A SCARA robot with joints displacement range q1,2 = −90◦...90◦ and q3 = 0..10cm and links lengths L1,2=10 cm.• A Cartesian robot with joint displacements’ range q1,2,3 = 0..10 cm.Which statement is correct?1) The Cartesian robot has a larger workspace.2) It is not possible to judge the workspace based on the information provided.3) Both robots have revolute joints.4) The SCARA robot has a larger workspace.arrow_forwardfor principle of öpelaliuil. Q4: A robot is used to service (load/unload) three machines in a cell, where the three machines have the same cycle time as 50 sec. the cycle time is divided as follow: Decide how this robot should service these three machines to Machine (M) Load/Unload Run M1 25 25 optimize the machine interference. M2 15 35 M3 10 40arrow_forwardThe joint of a robot's shoulder can be modeled by the rotational mechanical system shown below. Calculate the transfer function G(s) = 0m(s)/Tm(s). Take bm = bL = 1 N-m.s/rad, k = 7.9 N/m, Im = 1 kg.m2, and j = 2.2 kg.m2. Upload your calculations in the next question. %3D %3D %3D Max arm inertia case Shoulder actuator model After normalizing the highest power of s in the denominator of the transfer function, what is the power of s in the denominator?arrow_forward
- Provide a complete and logical solution for each problem. If linear interpolation is required in the problem, tabulated values is considered as a solution. Also, provide T-S or P-V diagrams for each problemarrow_forwardHow can speed be attained from path function and time?arrow_forward4(а) Describe, in your own words, the difference between a deterministic finite automa- ton and a nondeterministic automaton. 4(b) In your own words compare and contrast a Linear Bounded Automaton, a Push- down Automaton and a Turing Machine. 4(c) Design a Turing Machine that takes 2 unary numbers on the tape, where the first number is greater than the second number, and computes and writes a unary number to the tape that is the first number minus the second number.arrow_forward
- I need a Signal-Flow Graph for the element in the image below. Please solve with images and details. Thanks!arrow_forwardOne of the disadvantage of negative feedback loop is lag caused because it can only be exerted after controlled variable has been disturbed. In order to minimize lag between a change in a controlled variable and the action of the effector, it is advantageous for the body to anticipate any likely change. Which one of the following physiological mechanism achieves this? Select one: a. Feedbackward control b. Feedforward control c.Positive feedback control d. All of the above e. None of the abovearrow_forwardFor the mechanical translation system below, find the force-voltage analogy and force-current analogy. Use the following values. K1 = 2 fv, = 1/2 M1 = 1+a %3D K2 = 2 fv2 = 4+b M2 = 5 K3 = 3+c fv3 = 3 a = 0 where a = 3rd digit of your student number %3D b = 5th digit of your student number b =7 C = 7th digit of your student number C = 5 For reference, the 1st digit of your student number is the leftmost number in your student number. Indicate your student number when solving problems.arrow_forward
 Principles of Heat Transfer (Activate Learning wi...Mechanical EngineeringISBN:9781305387102Author:Kreith, Frank; Manglik, Raj M.Publisher:Cengage Learning
Principles of Heat Transfer (Activate Learning wi...Mechanical EngineeringISBN:9781305387102Author:Kreith, Frank; Manglik, Raj M.Publisher:Cengage Learning