
Concept explainers
Videos
Interpretation:
For anoverdamped system forced by a square wave given by
Concept Introduction:
Poincare map is defined by
Answer to Problem 3E
Solution:
a)
b)
c) The limits of
d) The Poincare map
e) Using a cobweb picture,
Explanation of Solution
a)
The given system equations are
Multiply the complete equation by
Integrate it with respect to
But,
Divide the complete equation by
Rearrange it as:
Let
Hence, it is proved.
b)
Suppose that the system has a T-periodic solution. Then,
But
Rearrange it as
Hence, it is proved.
c)
Similarly,
These results are plausible. Since as
As
And the solution becomes
d)
Since,
In a general form, it can be written as
It is a straight line equation of the form
The plot of
e)
The cobweb plot of the given system at
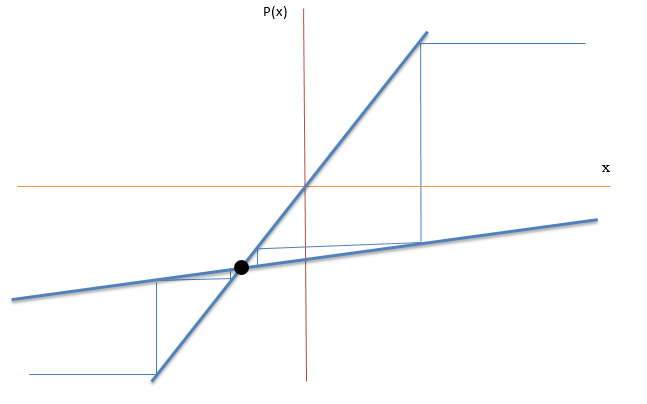
Since
Want to see more full solutions like this?
Chapter 8 Solutions
Nonlinear Dynamics and Chaos


 Advanced Engineering MathematicsAdvanced MathISBN:9780470458365Author:Erwin KreyszigPublisher:Wiley, John & Sons, Incorporated
Advanced Engineering MathematicsAdvanced MathISBN:9780470458365Author:Erwin KreyszigPublisher:Wiley, John & Sons, Incorporated Numerical Methods for EngineersAdvanced MathISBN:9780073397924Author:Steven C. Chapra Dr., Raymond P. CanalePublisher:McGraw-Hill Education
Numerical Methods for EngineersAdvanced MathISBN:9780073397924Author:Steven C. Chapra Dr., Raymond P. CanalePublisher:McGraw-Hill Education Introductory Mathematics for Engineering Applicat...Advanced MathISBN:9781118141809Author:Nathan KlingbeilPublisher:WILEY
Introductory Mathematics for Engineering Applicat...Advanced MathISBN:9781118141809Author:Nathan KlingbeilPublisher:WILEY Mathematics For Machine TechnologyAdvanced MathISBN:9781337798310Author:Peterson, John.Publisher:Cengage Learning,
Mathematics For Machine TechnologyAdvanced MathISBN:9781337798310Author:Peterson, John.Publisher:Cengage Learning,
